Aero & Astroカテゴリの記事
Assisted GPS (A-GPS)クライアントの実装
GPS関係の処理をRubyから使えるようにしたgps_pvt gemは色々なストリームやファイル、シリアルポート(GPSデバイス直結)から情報を読み込めるようにしてあります。このたびv0.10で初期測位を早めるためのAssisted GPS (A-GPS)に対応しました。単独測位をするのであればgemをインストール後に以下のコマンドで例えばAndroidなどて使われているGoogleのサーバから情報を取得してA-GPSを利用できます。
生データに近い物が見たければ、以下のコマンドでJSON形式でエフェメリス等が得られます。
エフェメリス(軌道情報)を読み込む程度なので実装は簡単かなと思って始めたのですが、結果的に色々調べる必要がありました。羅列ですが、調べたものを残しておこうと思います。
- SUPL
- Secure user plane location。A-GPSの事実上の標準実装(という理解)。プロトコル名としてはUserPlane Location Protocol(ULP)。表面を覆っているのがULPで、中身のペイロードにはLPPやRRLPといった別のプロトコルが使われる。実装例が少ない中、tajuma/suplやgoogle/supl-clientが参考になった。
- LPP (TS 37.355)
- LTE Positioning Protocol。エフェメリスなどの定義がある。GPS以外の定義もしっかりされている。
- RRLP (TS 44.031)
- Radio Resource Location service Protocol。LPP同様エフェメリスなどの定義があるが古めの規格。プロトコルとしてはGPS以外も使えそうに見えるが、GoogleのSUPLサーバに問い合わせてもGPSのエフェメリスしかくれない模様。
- ASN.1 (X.680)
- Abstract Syntax Notation One。ULP, LPP, RRLPなどの文法は全てこれで書かれている。Rubyにも主にSSL証明書をパースする目的でOpenSSL::ASN1の実装があるが、機能が限定的で今回は使わなかった。代わりにRubyの構文解析ツールであるRaccを使う前提で文法asn1.yを定義し、asn.1形式の文法ファイルをパースできるようにした。asn.1をasn1.y(から作ったRubyコード)で事前にJSONに変換(upl.json.gz)して本番では利用している(rake upl.json)。Samayou Oharikuiの和文解説やGusztáv ADAMISさん(ERICSSON)のスライド(PDF)がとても参考になった。OSS NokalvaやObjective Systemsも参考にした。
- PER (X.691)
- Packed Encoding Rules。SUPLではバイナリで情報がやり取りされるが、その時のエンコーディングルールにBasic Unaligned PERが指定されている。前述の参考資料にも解説あり。RSpecで(asn.1から変換した)JSONとPER間のテストを書いて検証した。
最後におまけとなりますが、SUPLサーバに対しては携帯のようにIMEIを渡すわけではなく、問い合わせホストのGlobal IPを渡すようにしてみています。
RubyでGPS姿勢推定
RubyでのGPS解析環境を充実させるへくgps_pvt gemを作っていますが、そのgemを応用して近接する複数アンテナを使った姿勢推定のプログラムを作ってみました。
Integer Ambiguityを全組み合わせで計算してしまうので、衛星がたくさん見えていると明らかに処理速度が落ちます。その部分を改善していきたいと思います。
RubyでGPS受信機
ちょっとすごいロガーのツールの一部を切り出して、RubyでGPSの測位処理ができるようにしてみました。githubにコードを公開しています。

Rubyのgemとしているので
で入れることができます。native extensionを含むgemなのでインストール中にコンパイルが走ります。Windowsの方はビルド環境(Ruby installer for Windowsでいうところのwith Devkit版でのRuby導入)が必要になります。
gemインストール後は
とすると、測位結果がずらずらとCSVで出力されます。単独測位、スナップショットでの解なので、実用性はあまりないです。これをベースに何か発展的なことをしたいという人向けのツールです。詳しくはReadmeを見てください。
プログラム的な話をすると、native extensionを作るためのextconf.rbが凝った作りになっています。shared libraryを複数生成する必要があるので、内部でMakefileを別名で複数生成し、それらを起動するMakefileを最後に生成しています。
Super Sylphide 進捗状況(75) -- RTKLIB探訪 rtksrv.c編
最近、オートパイロットシステムTinyFeatherのGPS機能を充実しようとしています。搭載しているGPS受信機から、できるだけ生情報に近い部分を使うことで、より高精度な測位をすることを目標としてみました。GPSに関連する情報を処理するのは、高須先生がソースを公開されているRTKLIBです。RTKLIBはPCのアプリとして動かすにはとてもよくできているのですが、TinyFeatherはPCとは入出力やスレッドをはじめとしてかなり環境が違いので、組み込むにあたってプログラム構造を理解する必要がありました。今回の記事はある程度理解が進んだので、そのまとめとなります。
なお、高須先生のコードからforkして、TinyFeatherなどの組み込み環境向けRTKLIBを独自に公開しています。記事を書いている時点では、できる限り少ないコード(ファイルやスレッドを使わない)で測位部分のみを抽出したminimal_rtkposが大きな追加部分となっており、その他もファイルやスレッドを使わないような分岐(それぞれWITHOUT_FILE, WITHOUT_THREADというマクロ)が施してあります。
RTKLIBは、共通の部分(ディレクトリでいうとsrc)とそれを覆いこむいくつかのアプリケーション(同じくapp)として提供されているのですが、そのうち注目したのはCUIベースのrtkrcvというプログラムです。GUIがない測位機能中心のプログラムなので、これを解析していくことにしました。
rtkrcvは、RTK測位のサーバ機能を提供するrtksvr.cを中心としたプログラムになっています。この構造は下図のとおりです。
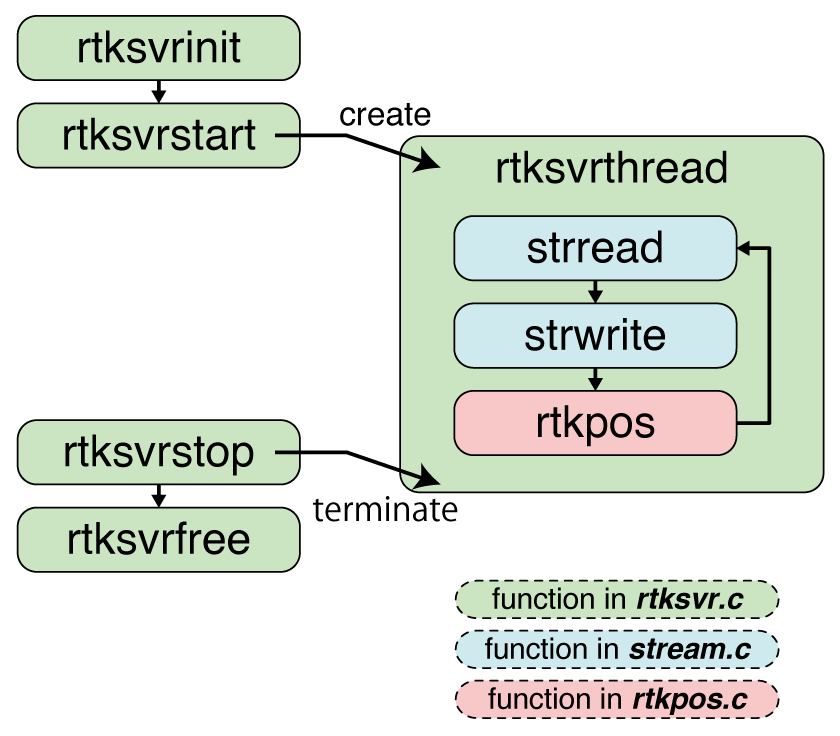
rtksvr.cの構造
rtksvrthreadというスレッドの中で無限ループがあるのが特徴で、そのスレッドはrtksvrstartで生成、rtksvrstopで破壊されます。スレッドないの無限ループでは、測位(rtkpos)が行われ、それに付随する入出力、すなわち、搬送波位相などの観測情報をはじめとしたデータの受信(strread)と、解析結果の送信(strwrite)が行われています。つまるところrtkposが一回の測位に相当しますので、TinyFeatherをはじめとした組み込み環境では、rtkposをループで叩き、その入出力をなんらかの形で行ってやればよいということがわかりました。
冒頭で紹介したminimal_rtkposは、rtkposを1回走らせるための最小限の入出力をつけたもので、ファイルやスレッド機構がなくとも動作します。rtkposを動作されるためには、引数となる構造体に対してどのような値を設定し、また出力としてどのような値が返されているのか把握することがとても重要でした。この関係を把握するにあたってはrinexファイルからの読み込みを記したrinex.cや、u-blox受信機の出力をパースするrcv/ublox.cが大変参考になりました。
以後、得られた理解をもとにTinyFeatherへのRTKLIBの移植を進めます。
※次の進捗は、ちょっとすごいロガーにテレメトリを追加した話です。
Boeing 787
Boeing 787に乗ってきました! 主翼のそばに座ってきました。
インボードエルロンがちょくちょく動く
gust alleviation とか gust load alleviation が入っているとも聞いていますが、どうなんでしょうか。機内は湿度が高いようで、喉が痛くならず快適でした。
近くの電子基準点を求める
ひとつ前の記事で富士川滑空場のGPS測位に関して記事を書きましたが、解析を行うに当たっては結果を示したPPP-Staticなどの単独測位以外にも相対測位も試してみました。相対測位を行うにあたっては、位
富士川滑空場のGPS測位
先日、TinyFeatherでとった人力飛行機のログについて記事を書きましたが、その際Google Earthが特に高度についてどのような測地系で管理されているのか、ということを書きました。そこで、ロ
XAircraft X650
AR.Droneではやりたいことに対してちょっと力不足なため、より強力なXAircraft X650というクワッドロータを購入しました。 折りたためるのがなかなか良い感じです。 当分はオー
Super Sylphide 進捗状況(46) -- TinyFeatherの誘導制御スケルトン
無人航空機(UAV)用オートパイロットシステム TinyFeatherですが、ようやく足回りが終わり、楽しい匂いがするところにやってきました。誘導制御です。ちなみに僕は天邪鬼で、足回りである航法の方が
Super Sylphide 進捗状況(42) -- Super Sylphideに関連した成果
無人航空機(UAV)向けオートパイロット装置Super Sylphideですが、ぼちぼち過去の成果が公表されつつあるようなので、まとめを作っておこうと思います。 そもそもこの装置は僕の趣味で作ってい
AR.Drone プロポで手動操縦
iPhoneなど操縦できる空飛ぶおもちゃ AR.Drone ですが、『iPhoneで操縦できるラジコンが許されるのは小学生までだよねー』という声が天から聞こえたような気がしたので、純粋にラジコンとして
AR.Drone プロポで操縦したい
AR.Droneという空飛ぶおもちゃですが、iPhoneやiPadなどの高度な機器からの操縦を前提されているため、ラジコンに関わっていると少々物足りない気分になってきます。ラジコンといったら、iPho
Turnigy9x 国内でも使いたい
ラジコンを制御するために使うプロポというものがありますが、以前そのプロポについてTurnigy9xという激安製品について触れました。ところがこの製品は海外向けでして、そのままで国内で使った場合、電波法
AR.Drone バッテリ作成
AR.Droneを色々と解析して遊んでいる(例えば、モータ)のですが、その過程でバッテリの買い増しを行いました。純正バッテリを使わないと危険、ということは重々承知していますが、別のラジコン用バッテリを
Turnigy 9x 電池逆接防止改造
AR.Droneの関係もあってか、最近ラジコン用品を色々購入してみています。中でも、プロポ(ラジコンをコントロールするための無線の送信機)の製品でTurnigy 9xというものが面白いです。激安なため
AR.Drone モータまわり
最近話題の空飛ぶおもちゃAR.Droneを買ってみました。iPhoneやiPod touch、iPadなどでコントロールできるWiFi接続のカメラ付クワッドロータ機ということですが、2-3回の練習で意
Airbus A380-800 搭乗記念
しばらく出張で更新が滞ってしまいました、すいません。最新で最大の旅客機であるAirbus A380-800に乗ったので記念にパチリ。 ルフトハンザの機材で成田-フランクフルト間です。揺れがあまり
『システム同定による小型無人航空機の飛行特性の取得』
ここ3年くらい僕がやっていた話をまとめた文章をリリースします。表題は『システム同定による小型無人航空機の飛行特性の取得』。興味があるようでしたら眺めてくださると幸いです。 内容ですが、ラジコンくらい
『あかつき』に初音ミクを載せよう -- 10000人署名達成
僕の周りのTwitterではかなりつぶやかれていたので、ご存知の方が多いのではないかと思いますが、JAXAの金星探査衛星『あかつき』に初音ミク(の絵)を載せようという計画が、超電磁Pこと森岡澄夫さんに
TeXで綺麗なアスペクト比の記号
TeXで飛行機関係の文章を書く最近なのですが、飛行機の大きさや重さといった緒元を表にしようと思っていました。そこで遭遇したのが、翼の細長さを表現するアスペクト比(Aspect Ratio)です。アスペ
Super Sylphide 進捗状況(27) -- 高運動性対応基板
オートパイロットシステムSuper Sylphideですが、最近搭載する乗り物の中には高速で回転するものがでてくるようになりました。元々は模型飛行機用として設計したので、そのような乗り物に載せるとセン
Super Sylphide 進捗状況(26) -- 飛行試験でDutch Roll
オートパイロット装置 Super Sylphideですが、今まで数度、飛行機を借りて、航法機能の精度を確認する飛行試験を行ってきました。航法機能というのは、カーナビの飛行機版で、『どのような場所を飛ん
Super Sylphide 進捗状況(25) -- DSP航法ファームウェア バク取れた
前回の進捗記事で航法ファームウェアの開発遍歴についてふれたオートパイロットシステム Super Sylphideのその後のお話です。航法計算が正確に動くことは開発の過程で実証できていたのですが、最終的
宇宙がアツいようです
あまり更新がないのもアレなので、最近の話題を書いてみることにします。お題は『宇宙がアツいぜ!!』。箇条書きでいきます。 まずはNHK、『ふたつのスピカ』の実写版をやるようですね。アニメが大変良かった
Super Sylphide 進捗状況(24) -- DSP航法ファームウェア開発遍歴
しばらく更新をしていなかったオートパイロットシステム Super Sylphide関連の話です。色々と大人の事情(世の中こういえば許されるらしい?、笑)があって記事を更新していなかったのですが、自分で
777th 777
先日まで所要の為、シアトルに行っていましたが、その際、ボーイングの飛行機生産工場へ行ってきました。そこで運良く、777機目の777(トリプルセブン)の引渡しセレモニーをやっているのをみることができまし
フライトログの可視化
珍しく飛行機の話題です。飛行機を飛ばして実験をしていると、どのように飛んだかを記録したフライトログが多く溜まるのですが、数値データをプロットしただけのグラフを見たところで何が起きているのか瞬時に理解す
Super Sylphide 進捗状況(21) -- 飛行機の中身
オートパイロットシステム Super Sylphideですが、機体の特性を得るべく黙々と飛行試験と数値解析(システム同定で安定微係数推算)を続けています。同じ作業が続いているので更新を行うような話は特
Super Sylphide 進捗状況(19) --最近の飛行試験
オートパイロットシステム Super Sylphideですが、順調に開発が続いています。先日の模型飛行機を使った飛行試験では、以前の記事『i2cでサーボインターフェイス』で書いたシステムを利用して、パ
『GPSのための実用プログラミング』
最近このサイトへアクセスしてくださる方の傾向を観ると、GPS関係のキーワードで検索エンジンから来られる方が多いようで、特に自作GPSロガーは大人気となっています。そのような流れを受けて、今後もできるだ
学生室内飛行機コンテスト
航空機について学んでいる大学生・大学院生への教育活動として、手作りの室内飛行機/飛行船の競技会『全日本学生室内飛行ロボットコンテスト』が今年も開催されるようです。今年で3回目のこの競技会は年々規模が大
Super Sylphide 進捗状況(14) -- McBSP(SPI)におけるCPU割込とEDMAの協調
製作中のオートパイロットシステムsuper Sylphideですが、DSP上で動作するプログラムのブラッシュアップを進めています。その中でDSPにかかるCPU割り込みが予想外に多く、処理負荷を上げてい
Super Sylphide 進捗状況(12) -- DSPプログラムROM化
オートパイロットシステムsuper Sylphideですが、航法(INS/GPSナビゲーション)部分がほぼ完成したので、プログラムをROM化しスタンドアローンで動作するようになりました。現在、倍精度浮
Super Sylphide 進捗状況(7) -- 圧力センサの較正
オートパイロットシステム Super Sylphideには、2種類の圧力センサが搭載されています。1つは穴が2つ空いていて、その2つの圧力差を測るためのゲージ圧センサ、1つは大気圧を測るための絶対圧セ
コンデンサ逆接に対する一考
いちおう僕は航空宇宙産業の端くれなので、打ち上げ前の問題発覚により、問題が解決し人工衛星打ち上げの成功率を高められたことは非常に良いことであると思います。スケジュールどおりいかず、延期になったことにつ
JX0122 @ OpenSky 2.0
ポストペットで有名な八谷氏がやっている一人乗り飛行機の展覧会に先日行ってきました。いわゆるメーヴェです。ちゃんと型式取っているみたいですね。 ちょっと見えないですが、翼の捻り下げ美しかったです。
『低精度MEMSセンサと汎用GPS受信機の融合による高精度航法システムの研究』
というタイトルで文章を書いていました、ようやく終わりました。 でもまだまだ続く文章作業。気が抜けませんが、これからは最低週一の更新を守りたいところです。 そういえばつい先日、TIのDSP開発環境であ
Super Sylphide -- an Autopilot System for Small UAVs [English version]
(the last update is Apr. 2011.) What's "Super Sylphide"? "Super Sylphide" is a novel autopilot syst
DSP基板+小亀基板+センサ基板
こんな感じになりました。 本来と逆さまですが 上がDSP基板の裏面(電源部+RAM+ROMが見えています)、次が小亀基板(SDが出ています)、一番下の緑色の基板が小々亀基板のセンサ基板(加速度計
室内飛行機用基板 Part.2
室内飛行機を自律飛行させる用の基板を以前つくりました(詳しくはリンク先の記事を辿っていってみてください)が、それのリニューアルをしてみることにしました。詳しい回路図や図面は、ある程度動作を確認してから
室内飛行機 コンセプト図
室内飛行機プロジェクトですが、今後が不明ですがとりあえず総まとめとして報告書をつくりました。その際に色々と図表を作ったのですが、イラストレータで絵を描くのが意外に楽しくなってしまい全体のコンセプト図が
室内飛行機 自律旋回飛行に成功?
室内飛行機の自律飛行を検討していたわけですが、基板等の各コンポーネントがとりあえず完成し実験をすることになりました。当初の予定では、それらを活用して体育館内で室内飛行機を自律旋回飛行させようということ
H8/3694用のフレームワーク
室内飛行機の自律制御システムを秋月電子のH8/3694ボードを利用して作成しているのですが、色々とプログラムができてきたので、ソースを公開してみようと思います。 ところでですが、マイコンで電子工作を
マイコンと超音波センサの接続
室内で飛行する模型飛行機の自動制御ですが、超音波センサを利用して壁までの距離、あるいは床までの距離を検出することを考えています。超音波センサは加速度計やジャイロのように単体で使うことができるわけではな
ラジコン受信機とマイコンの接続
室内で飛行する模型飛行機の自動制御を企んでいるわけですが、機体外から送られてきた制御情報と、機体に搭載されたセンサから得られた情報を、機体内のマイコンでミキシングすることによって全体のシステムが成立す
室内飛行機用の基板、到着
Olimexに頼んでいた、室内飛行機を制御するための基板が届きました。左から順にプロポとPCを接続するアダプタ、超音波センサをドライブする回路、制御基板のマザーボードです。詳しくは過去の記事、『プ
お手軽 INS/GPS
最近、室内飛行機の自律飛行に関する記事をたくさん書いているので、そういう関係の方が多く見てくださっているようですが、せっかくなので自分がメインにしている内容についても簡単に紹介しておこうかと思います。
機体搭載基板
室内で飛行する模型飛行機を自律飛行させる件ですが、地上側はプロポをPCからコントロールできるようになったり、と準備が着々と進んでいるので、機体側の開発に移行しています。 機体側には壁や地面などの障害
プロポとPCの接続基板
とりあえずプロポとPCの接続が完了したわけですが、周囲の話を聞いているとそれなりに需要がありそうなもののようなので、基板をおこしてみることにしました。ちなみにもの自体は基板の力を借りることなく手配線で
プロポとPCの接続完了
プロポとPCを接続する話ですが、コンパイラのバグに遭遇するなど不運な事態に遭遇したものの、ようやく完成しました。回路図(EPS版)と使用したPIC(16F648A)に焼きこむためのバイナリ(HEX
プロポとPCの接続
室内飛行機の航法系を検討していましたが、その中でビデオカメラを用いて位置や姿勢の同定を行うというプランがあります。 ところで、実際に室内飛行機を飛ばすためには航法系の上位にある制御系を構築し、画像処理
室内飛行機 航法系の検討
訳あって、体育館などの室内で飛ばせる模型飛行機の自律飛行を検討しています。室内で飛ばせる、というのが非常に制約になっていて、まず機体が小さくなければいけません。重さでいうと、全体の重量では150g以下
Open source GPS C/A信号の抽出
オープンソースGPSを作ろうという企画ですが、ぼちぼち作業をしています。少し進展がありましたので、その経過報告ということで記事にしてみます。 今回の報告は以前の3段階フェーズ分けに従うと、第2段階の
JAXA NEXST-1
先週の日曜日、お台場の近くにある科学未来館というところに遊びに行ってきました。目的はJAXAの小型超音速実験機『NEXST-1』の実機展示です。実際にオーストラリアで打ち上げられたものを会場で生展
Open source GPS 計画編
少し前にオープンソースGPSの話を記事にしましたが、その後、日本人でオープンソースGPSの開発に関わっている海老沼さんという方からメールを戴き、色々と話を伺うことができました。その中でわかったことは、
Open source GPS
僕は実は航法(ナビゲーション)という分野の研究をしていることになっているらしいです。ということで、最近GPSも守備範囲にしたいなと思い、日夜そういった関係の文献・サイトを漁っています。 日本ではほと
H2A 9号機
H2A 9号機の打ち上げが迫っています。18日の15時26分だそうで、今のところ準備は順調に進んでおり、当日の天候も晴れ後曇りで問題がない見込みのようです。 ということで、これから種子島にロケットを
GPS Time (GPS時刻)
時計の話です。 原子時計は正確に時を刻み続けています。何があっても決められた規則どおりに時は過ぎていきます。ところが僕らが住んでいる地球では日の長さ、つまり地球の公転・自転との関係で時刻を決めているの
下地島へ
今日から実験で下地島というとこに行ってきます。下地島というのは、沖縄の宮古島の隣の島で、島全体がほぼ空港の島です。島にある航空ということですが、あなどるなかれ3000mの滑走路があり(ちなみに羽田は3
飛行実験のまとめ
先月17日に調布飛行場にてセスナで実験をしてきましたが、そのデータを整理してみました。いちおうデータは取れているみたいです。特徴的なものを紹介したいと思います。 GPS 2D履歴 調布周辺を飛び
衝撃画像
このあいだ無事に地球に帰還したスペースシャトル ディスカバリーですが、24時間の延期に加え、2回の着陸延期を経てようやくエドワーズ空軍基地に着陸しました。聞くところによるとできるかぎり着陸を延期して、
STS-114 無事帰還!!
スペースシャトル ディスカバリーが無事帰還しました。成功してくれて嬉しい限りです。 エドワード空軍基地22滑走路に降りた瞬間を赤外線カメラで捕らえたもの(© NASA)。夜間着陸。 今日は有楽町
STS-114 断熱材剥離
STS-114(スペースシャトル ディスカバリー)ですが、打ちあがったはいいものの、断熱材の剥離問題が解消しておらず、次回以降のフライトが無期限延期になってしまったようです。 白丸が剥離した部分。
STS-114 Launch!!
STS-114(スペースシャトル ディスカバリー)打ち上げ成功、おめでとう!! (写真は© NASA) 長かった沈黙をやぶり、とうとう打ち上げられました、スペースシャトル。感動のあまりTVの前で涙
M-Ⅴ 6号機 打ち上げ成功
祝、打ち上げ成功!!本日、宇宙研のロケット、M-Ⅴ 6号機が打ち上げに成功したようです。 写真は打ち上げの瞬間(© JAXA)。 ネット中継みましたが、現地の天気はよかったようで、問題なく発射シ
M-Ⅴ 6号機 打ち上げ延期
本来なら今日が宇宙研のロケットM-Ⅴ 6号機の打ち上げ予定日だったのですが、悪天候のため延期されてしまいました。残念です。 悪天候とのことですが、宇宙研の先生の話によると予測された気象条件とあわない
愛知万博ロボット週間にむけて
僕のいる研究室では愛知万博ロボット週間(6/9~6/19)に参加します。OBK-Skyeye 1 & 2という飛行ロボットを展示します。 そういうわけでその展示の予行演習ということで、昨日、今日と大
H2A 7号機
26日にH2A 7号機が無事あがったようです。良かった。(写真は、© RSC/JAXA) 今回は気象観測衛星『ひまわり』の後継となるMTSATという衛星を打ち上げるのがミッションでした。ピギーバッ
ハッブル宇宙望遠鏡
人工衛星を用いたミッションで最も成功したといえるハッブル宇宙望遠鏡ですが、巷で言われているように延命治療を施すことなく寿命をもって運用を終了することに決まったようですね。気になったので色々と調べてみま
『MEMS センサを用いたINS/GPS 複合航法システム』
卒論ですが、実機試験はまだなのですが、文章がある程度まとまったので未完ながら公開したいと思います。結局タイトルは『MEMS センサを用いたINS/GPS 複合航法システム』です。まんま。 本文(未完
PCB発注
卒論用の基板を発注しました。Eagleで作成、Olimexに発注です(詳しくはここ)。見栄えがするようにべたアースは消してあります。 この基板は慣性航法のIMU(Inertial Measure
ARLISS 2004
缶サットですが、打ち上げ段階に入りました。今日から渡米して、打ち上げ試験をしてきます。 今回の缶は『センサ詰め込み缶』です。ロボットを作っている方にはお馴染みでしょうが、司のジャイロを3軸、アナ
『超小型航空機における位置および姿勢の同定』、中間発表
卒論の中間発表を先週の木曜日に行いました。そのときの資料を公開します。パワポとレジュメ。もし何らかの形で使用したいと思われましたら、メールしていただけると幸いです。 タイトルは『超小型航空機における
缶サット 板倉実験
7/14早朝、群馬県板倉町にある敷地に缶サットの試験に行きました。 缶サットというのは空き缶サイズの人工衛星(もどき)で、あの超小型人工衛星のCubesatをやっている中須賀研究室が学生の教育のた
X Prize!!
いゃー、すごいですねー、X Prize。1人で宇宙空間にいくところまでは成功したみたいです。写真はSpaceShipOne。 成功したチームはScaled Compositesというチーム。母艦の
全翼機
今年もまた5月祭がありますが、それにむけてR/C飛行機を作成しました。写真の赤いやつを含め、2台つくりました。 全翼機とよばりれるタイプの飛行機で、尾翼がなく、全体が一枚の羽で構成されています。
筑波宇宙センター
なんだかわかりますか? 正解は、宇宙飛行士が訓練を行うための巨大なプールです!! 筑波宇宙センターに見学に行ってきました。ALOS(陸域観測衛星)とETS-8の実物、『きぼう』のコピーがおいてあ
H2A 発射台(整備塔)
最近、写真がなくて寂しいので、探してきました。これはH2Aの発射台(整備塔の中にいる状態)を下から見上げて撮ったもんです。先っぽの丸の部分に、あのトンガリがピタっとはまります。もちろん、場所は種子
フライトシミュレータ
研究室ではラジコンを飛ばしているので、それの操縦訓練の一環としてラジコンのフライトシミュレータを現在特訓中です(遊びではありませぬ)。 なかなか難しいですね。ラジコンといえども凄いやつになるとジェッ
種子島H2A射場
種子島に行ってH2Aの射場を見てきました(3/17)。むなしくなりました…。 H2Aは実は2機同時期に整備&発射できるようになっているらしいですが、予算の都合でロケットをあまり打ち上げられないので、
驚異の独創
本を買いました。『驚異の独創 NASA 航空機大全』。 飛行機本なんですが、NASAの変わった飛行機の特集です。カラーページが半分くらいで、写真だけみていても楽しいです。びっくりしたのは無垂直尾翼
アークエンジェルは燃え尽きない
ガンダムSEEDでアークエンジェルが大気圏に突入する際、ゲル状の液体みたいのを放出していましたが、あれって地球に突入する際の空力加熱の影響を制御するためのもんだったんですね。ということを今日の空力の授
月の土地が買える!?
H.I.S.で月の土地プレゼントキャンペーンなるものをやっているようです。ほんとに月の土地がもらえる??、ということで興味があったので調べてみました。 もらえるのはどうやら月の土地の権利書のようです
軌道エレベータ会社
今日、授業で軌道エレベータの話がでました。軌道エレベータというのは、地球の静止軌道まで長いロープでエレベータを作り、ロケットなどの野蛮な(笑)手段に頼らずにモノ、例えば衛星や宇宙船を運ぼうという技術
人工衛星シミュレータ
学科の課題でつくりました。現在のところ、数値の羅列しか出力しないので、つまらないです。時間があったらDirectXやOpenGLを使ってビジュアルに表示できるようにしたいと思います。 ソースはここ
飛行機生誕100周年
今日はライト兄弟が大空を飛んでから100年目の日です。ライト兄弟による初飛行は数秒しか飛んでいませんが、現在までの飛行機の急速な進歩をみる限り、この飛行は偉大な一歩ではないでしょうか。 今日はその1
『夢の値段』
BRUTUSという雑誌の1月号のタイトルが『夢の値段』。その題のとおり、内容は夢を実現したらいくらかかるかということで書き連ねられています。 宇宙旅行に行きたい…22億円にはじまり、ゾウガメに乗りたい
駄目なプロジェクト名
Milanoさんのところの記事『プロジェクト名自動生成ツール』を読んで思ったこと。プロジェクトの名前はやっぱりかっちょえぇものがいいという話なんですが、かっちょえぇ以前に本当にましな名前をつけないとあ
vs ナウシカ型の飛行機
今日、製図の授業があったんですが、課題のチェックだけだったので30分もかからないうちに終了。その後、製図のT先生と会話をしました。で、話題は『航空機をもっと手ごろに』。 T先生いわく、俺は一家に一台
Airbus Beluga
今回はエアバスの変わり者飛行機、Beluga(ベルーガ)の紹介。この飛行機を紹介するに至った理由は、研究室で今日借用したコップにベルーガの絵が書いてあったから、ただそれだけ。 名前の由来となった
プラネテス オープニングより
『ロケットの父』ツィオルコフスキーご本人 『近代ロケットの父』ゴダードのロケットの実験。飛び上がった高度はわずか、10mにも満たなかったらしい フォン・ブラウンが開発したV2ロケット。ドイツはベル
サイエンスZERO 飛行機
火曜の深夜(0:00~0:44)にNHK教育でやっているサイエンスZEROという番組、昨日の回は飛行機についてやってました。 その内容で興味をもったのが、地面効果(表面効果ともいう)を活用した地
翼のリベット
今日、製図の授業で、T先生が航空機のリベット(板と板をつなぐ接合部品)やネジを持ってきてくれました。 一番びっくりしたのが、左の写真。これ、バレルボルト(形が樽に似ているからこういう名前だそうです
SERVIS-1
本日、打ち上げられます。『SERVIS-1』(サービス・ワン)とは衛星の名前で、民生品をできる限り利用した初の廉価版衛星らしいです。文科省の管轄の衛星だったと思う。打ち上げは日本のロケットではなく、ロ
A 109K2
学科の製図課題はヘリコプターにしました。Agusta A 109K2。写真にもあるとおり、このヘリは富山県警の山岳警備隊で使われているもので、名前を『つるぎ』といいます。このヘリは山岳遭難の救助に
747-400
の操縦を今日してきました@学科のフライトシュミレータ(実験でね)。着陸をやった。で、結果は、というと、乗客が1000人くらい死んだ=5回やって2度着陸成功。でも言い分けさせてもらうと、その失敗した3回
神舟5号
中国で有人宇宙船『神舟(Shinsyu)5号』が打ち上げに成功した模様。地球を14周して内モンゴルに着陸する予定らしい。いゃ、すごいですね、日本からこんなにも近い国で有人が可能になるなんて…。これ
707
学科の課題で飛行機を一機選定することに。Boeing707にしました。トリプルセブン(777)とかのご先祖様です。で、真二実験課題はこのパラメータを使うことに決定しました。で今日は707の解説をジェー