Super Sylphide 進捗状況(19) --最近の飛行試験
オートパイロットシステム Super Sylphideですが、順調に開発が続いています。先日の模型飛行機を使った飛行試験では、以前の記事『i2cでサーボインターフェイス』で書いたシステムを利用して、パイロットの入力を50Hzで取得することに成功しました。
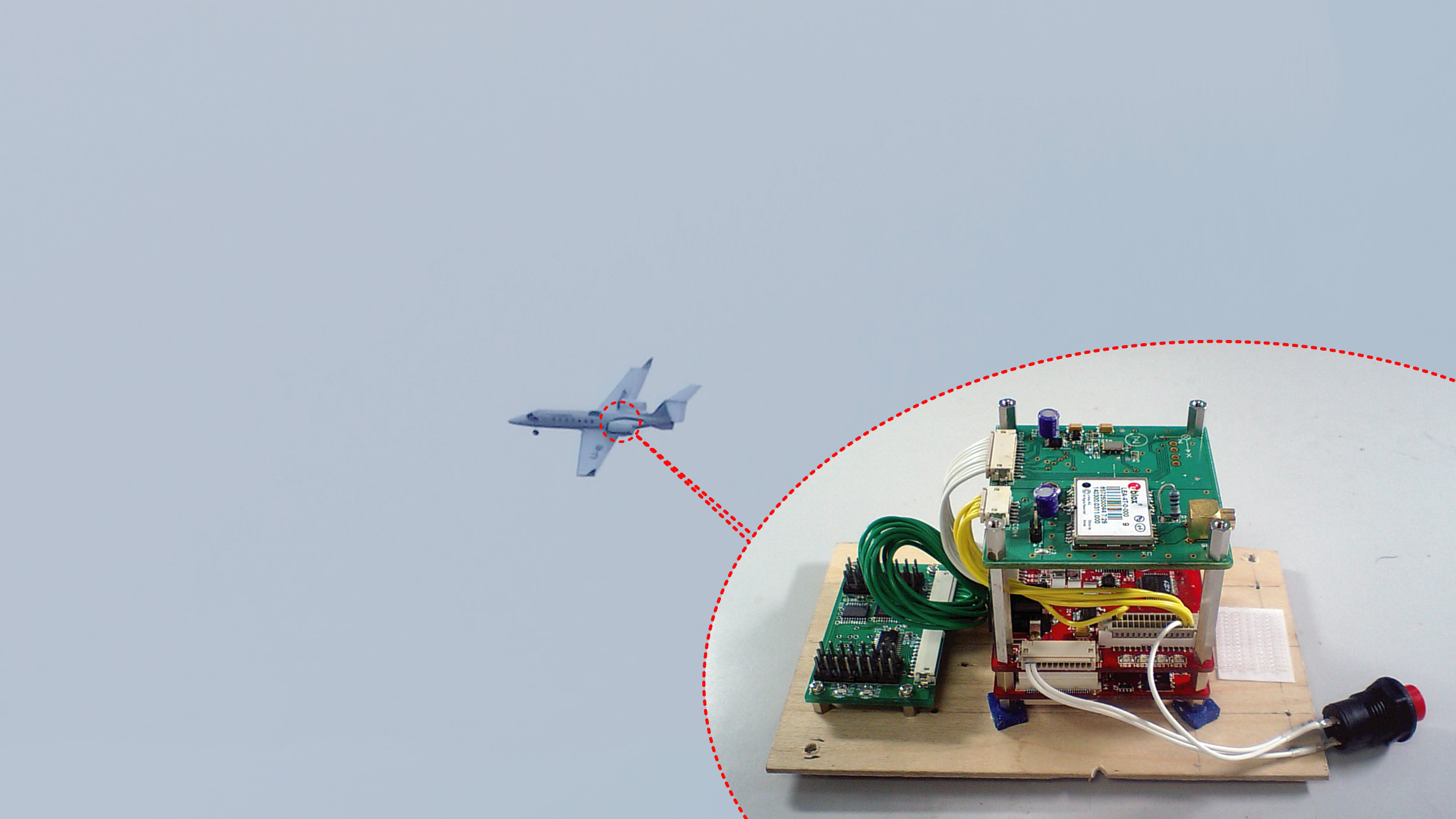
双発ダクテッドファン機で実験中
入力履歴をとるとこんな感じでした。
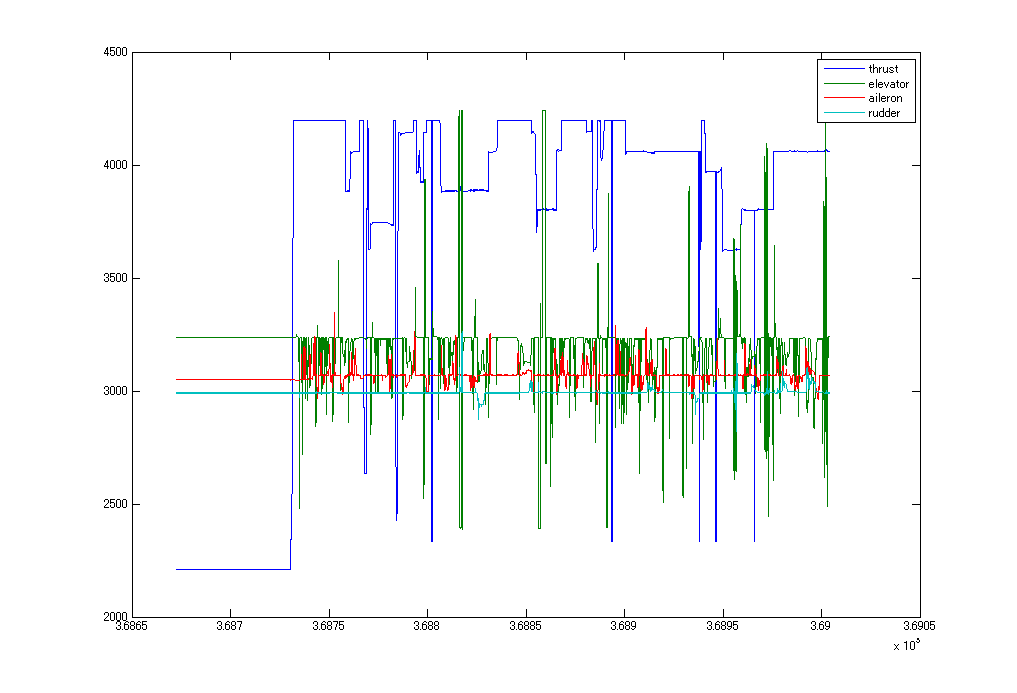
入力は4系統(左右スラストは同一チャンネル)
機体の特性把握(いわゆるシステム同定)に向けた特殊な入力も、名パイロットの"社長"氏にお願いして、マニュアル操縦で入力してもらいました。うまく入力できているみたいです。
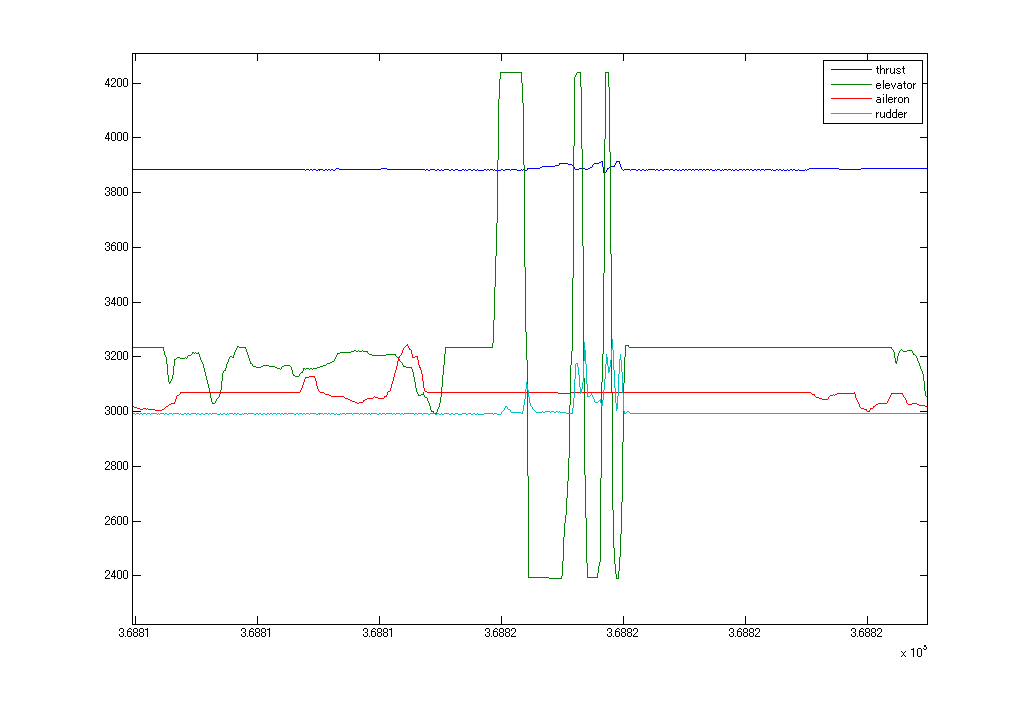
タイミングが重要
残念ながら機体の挙動は、モーターの振動が加速度計を共振させてしまっているようで、ちゃんと取得はできませんでした。ペイロード重量の関係で防振対策ジェルを入れられなかったのが敗因です。次回までのこの部分は徹底究明する必要がありそうです。
このまま順当にいけば、数回の実験による飛行データをもとに誘導、制御に取り掛れそうです。また開発が佳境に入ってきたこともあり、チームプレーになってきました。パイロットの"社長"氏、機体整備のY氏、発進担当のM君、ピトー管を作っているH君、これからもよろしくです。
※その後、コメント欄にちょっと書いてあるカメラモジュールの基板を企画してみました。

コメント
>odawaraさん
実は飛ぶのは結構前からやっていたりするのですが、なかなかよさげな写真を撮り忘れていたので、今日まで飛行機の写真がでなかったわけです。上の写真も実は動画から切り出して加工したのですが、最近のシリコンビデオカメラ(共用物)の解像度が半端ない(2M Pixel !!)ことに驚いています。
個人的にもそういう類の製品が欲しいのですが、自作してしまおうかと(笑) ということでsparkfunのカメラを買ってみたりしました
http://www.sparkfun.com/commerce/product_info.php?products_id=8668
CPLD+SDRAMでフレームバッファを作って、お得意のC8051でSDとUSBを繋げる計画です(にやり)
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。
おお!飛び始めましたね!
Posted by: odawara : July 13, 2008 09:31 PMだんだん大所帯になってきたみたいですが、がんばってくださいね!