AR.Drone モータまわり
最近話題の空飛ぶおもちゃAR.Droneを買ってみました。iPhoneやiPod touch、iPadなどでコントロールできるWiFi接続のカメラ付クワッドロータ機ということですが、2-3回の練習で意図どおりに飛ばすことができ、とてもよくできているおもちゃだと思います。
さて僕が興味があるのは、飛んで楽しいなぁ、というところで留まるわけではなく、中身まで弄り倒すことなので、早速分解をはじめてみました。最終的には僕が作成しているオートパイロットシステム Tiny Featherと組み合わせて屋外で自律飛行させたい、と思っています。
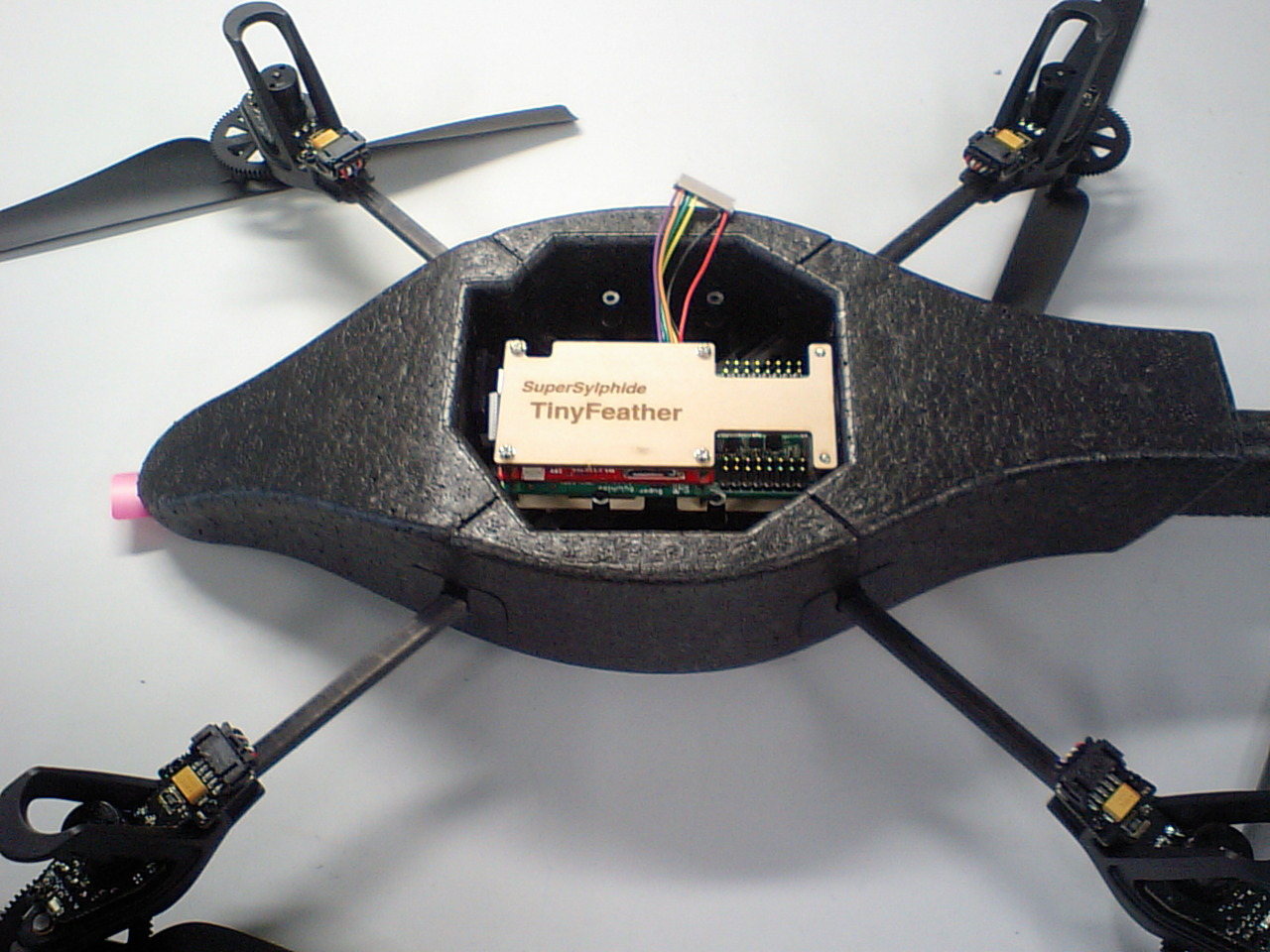
近い将来はこうなる!?
現在特に興味があるのはモータやバッテリーなどの動力まわりです。調べてみた結果をいくつか書いておこうと思います。モータは全部で4つ、種類がブラシレスであり、それぞれにスピードコントローラ(スピコン、ESC)と呼ばれる回転数を制御して推力を調整するユニットがつけられています。さらにモータの出力はプロペラをそのまま駆動するのではなく、ギア比68:8でギアダウン接続されています。
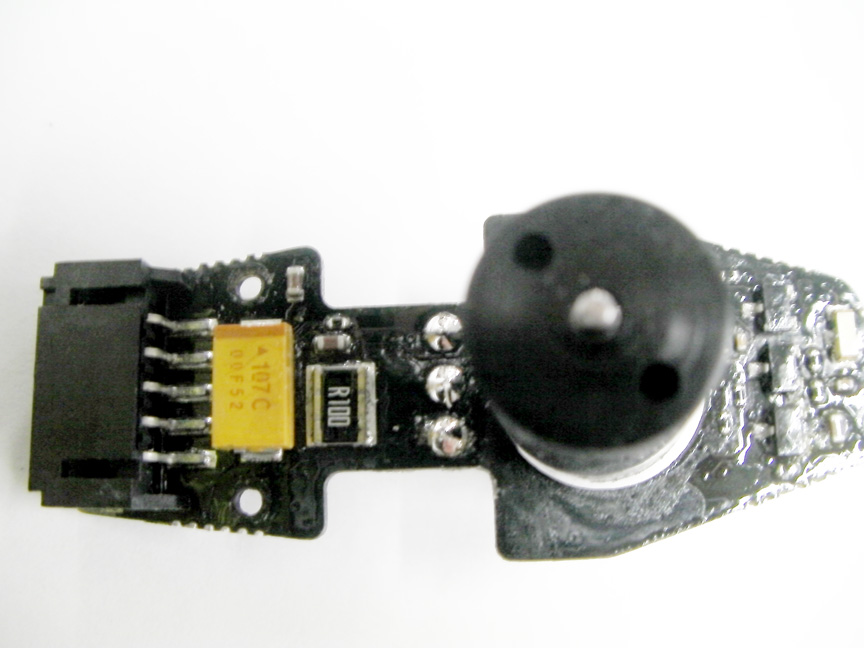
全体像(プロペラとは反対方向より)
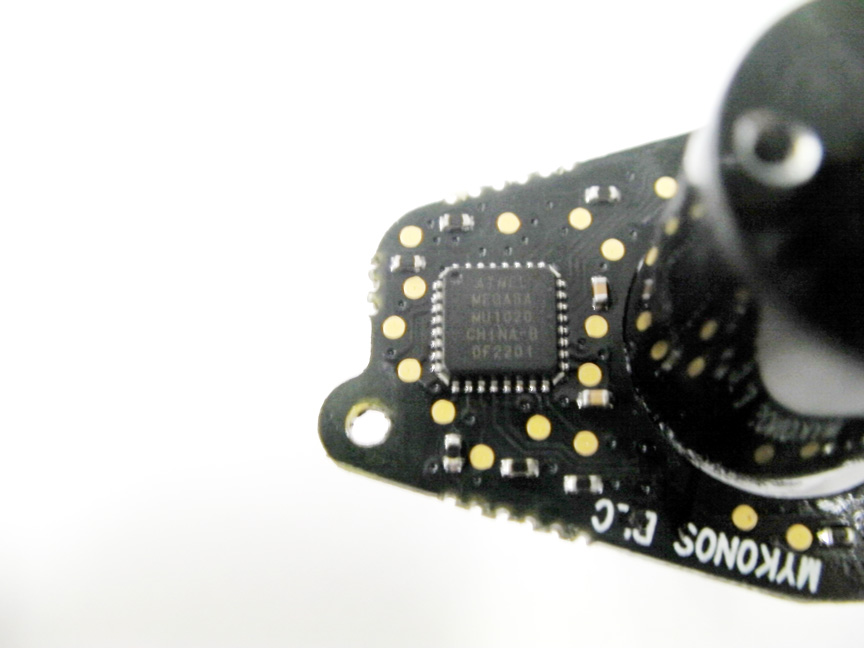
スピコンの制御部はAtmel ATMega8a
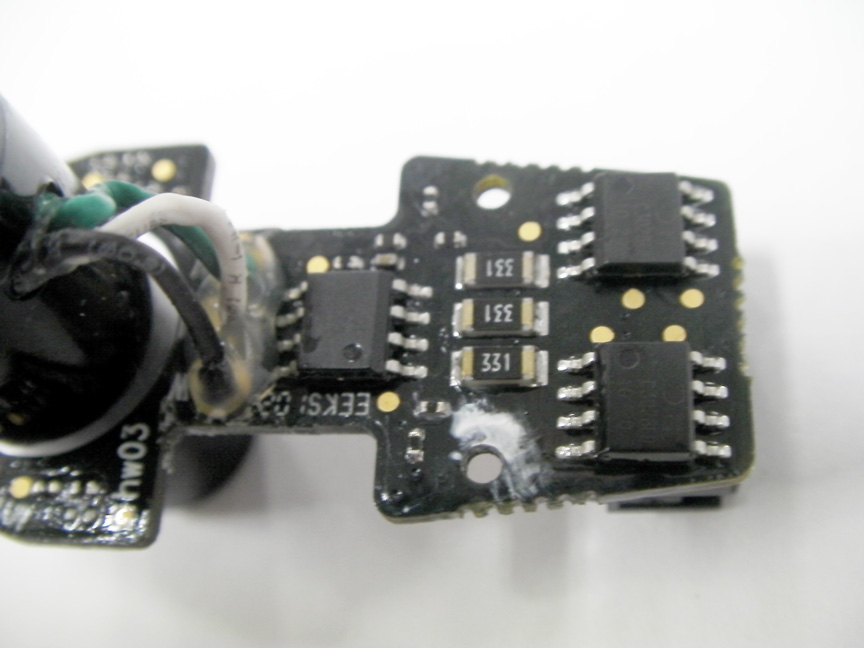
Power MOSFET(Diodes DMC3028LSD)が3個 (@munefさん、ありがとうございます)
中央のコントローラとスピコンは5本の線で接続されています。そのうち2本はVCCとGNDなので、残り3本のプロトコルがわかれば、中央をTiny Featherに置き換えることが確実に可能になります。これについては現在調査中です。
また純正のバッテリは、LiPo 3セル(11.1V) 1000mAh 10C discharge 外形 72x39x24mm 重さ105gでした。コネクタは@sonson1919さんの助言によるとJST ELコネクタでは、とのことで、現物を取り寄せて検証しようと現在していますした結果、そのとおりでした。
※配線について更に調べてみました。スピコンに繋がる5本の線ですが、以下のような配線のようです。
- 1ピン バッテリからの直接給電
- 2ピン ATMega8a用のVCC(5V)
- 3ピン ATmega8aのPD0(RXD)/PD1(TXD)の両方に接続
- 4ピン ATmega8aのPC3(ADC3)に接続
- 5ピン GND
3ピン、4ピンの波形が気になるところです。
※その後、バッテリを増強しました。

コメント
>yasudaさん
もしかしたら安定化のために画像も使っているような気もしています。確証はまったくないのですが… あるいはモデルが相当正確に取得されているかもしれません、相当安定して飛ばすことができます。
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。
私も興味があり気になってるんですが、まだ購入してません。
メーカーサイトによると、3軸ジャイロと3軸加速度センサと
超音波距離センサが搭載されているようですね。
自由に操縦できるということは制御方式としては、
Posted by: yasuda : November 15, 2010 01:57 PMピッチ=姿勢角目標値への姿勢角追従制御系?
ロール=姿勢角目標値への姿勢角追従制御系?
方位=角速度目標値への角速度追従制御系?
高度=Z方向対地速度目標値への追従制御系?
でしょうか。