Super Sylphide 進捗状況(7) -- 圧力センサの較正
オートパイロットシステム Super Sylphideには、2種類の圧力センサが搭載されています。1つは穴が2つ空いていて、その2つの圧力差を測るためのゲージ圧センサ、1つは大気圧を測るための絶対圧センサです。今回は前者のゲージ圧センサについて、最近行った較正作業の紹介をしようと思います。
このゲージ圧センサを何に使うかというと、飛行機の速度を出すのに利用できます。簡単に原理を紹介しておくと、航空関係の方なら誰でも知っていると思われる、ベルヌーイの式という有名な方程式があります。
![]()
この式は速度がある気体の圧力を計測するとどうなるか、ということを簡易的に示した式(詳しくはWikipedia先生参照)で、p_{0}は速度がある方向に正対して計測した圧力(全圧)、pは速度がある方向に直交して計測した圧力(静圧)を示しています。この式に基づくと、ゲージ圧センサによってp_{0}とpの差が得られれば、かつ気体の密度ρがわかれば、気体の速度Vが計算できます。逆に気体が静止していると考えれば、気体に対する速度、つまりは空気に対する飛行機の速度を知ることができます。
なお、一般的な飛行機では差圧を得るのに、ピトー管という特殊な導圧管を利用しています。
ということで本題の較正作業ですが、差圧をとる為に2つ穴が空いているゲージ圧センサの片方の穴に速度がある気体を、もう片方の穴に静止した気体を入力して、どのような電圧がセンサから出力されるか確認しました。
ゲージ圧センサはfreescale MPXV5004DPで、速度のある気体を得るために、一定の気体速度を出せる較正用風洞を利用しています。また圧力を穴まで導くために、アルミパイプと耐圧チューブを使いました。
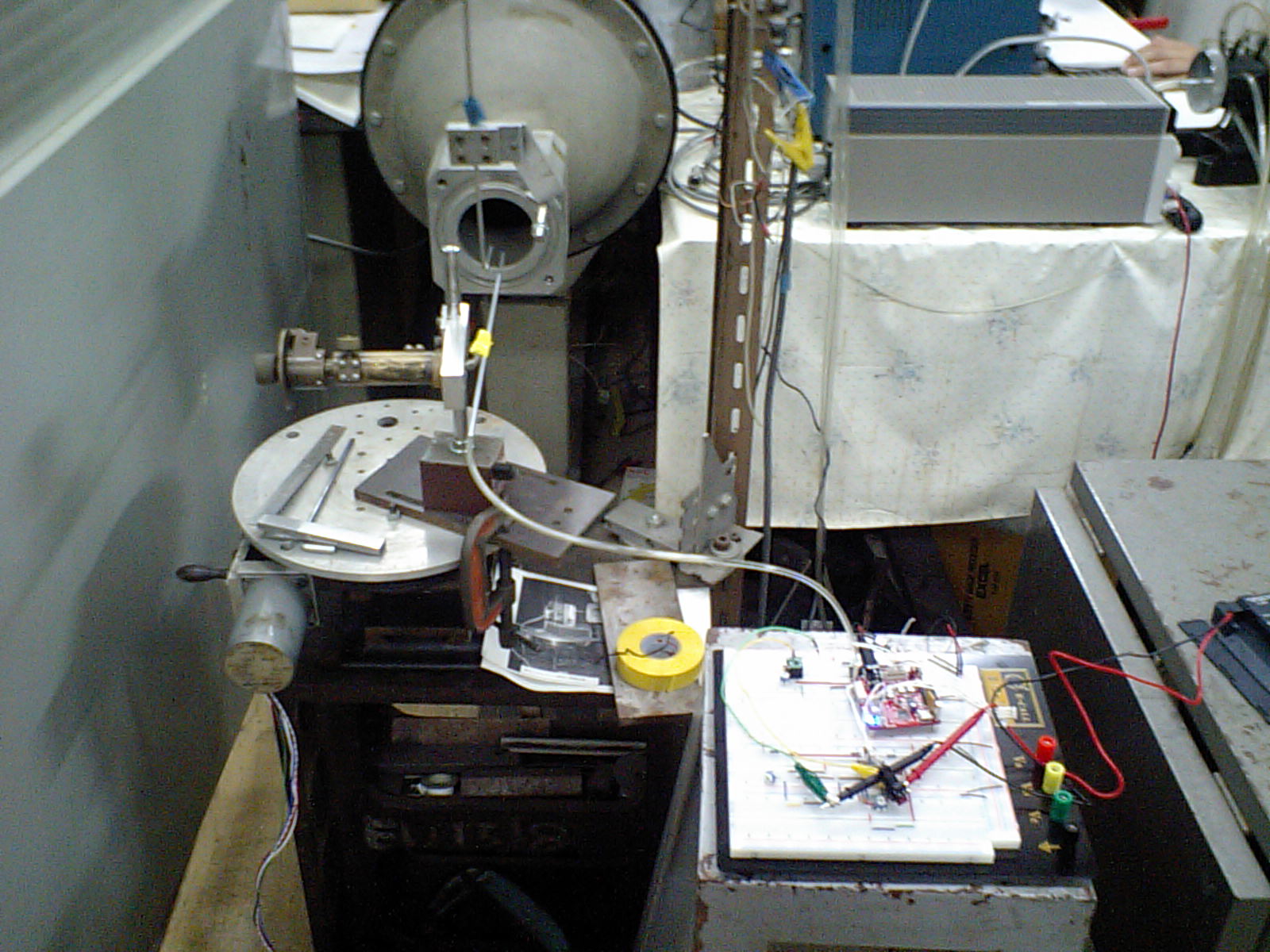
作業風景。左側に見える穴が風洞の出口。そこからアルミパイプとチューブでセンサの穴へ。
計測結果。
ベルヌーイの式のとおり、気体の速度の2乗に支配された電圧が出力されました。模型飛行機が飛行する20m/s以下といった低速域でも、十分使用可能なことが確認できました。
※その後、DSPとマイコンでSPI通信ができるようになりました。

コメント
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。