Super Sylphide 進捗状況(21) -- 飛行機の中身
オートパイロットシステム Super Sylphideですが、機体の特性を得るべく黙々と飛行試験と数値解析(システム同定で安定微係数推算)を続けています。同じ作業が続いているので更新を行うような話は特にないのですが、あまりにも更新がないのはさびしいので飛行機の写真を貼っておこうと思います。

外観
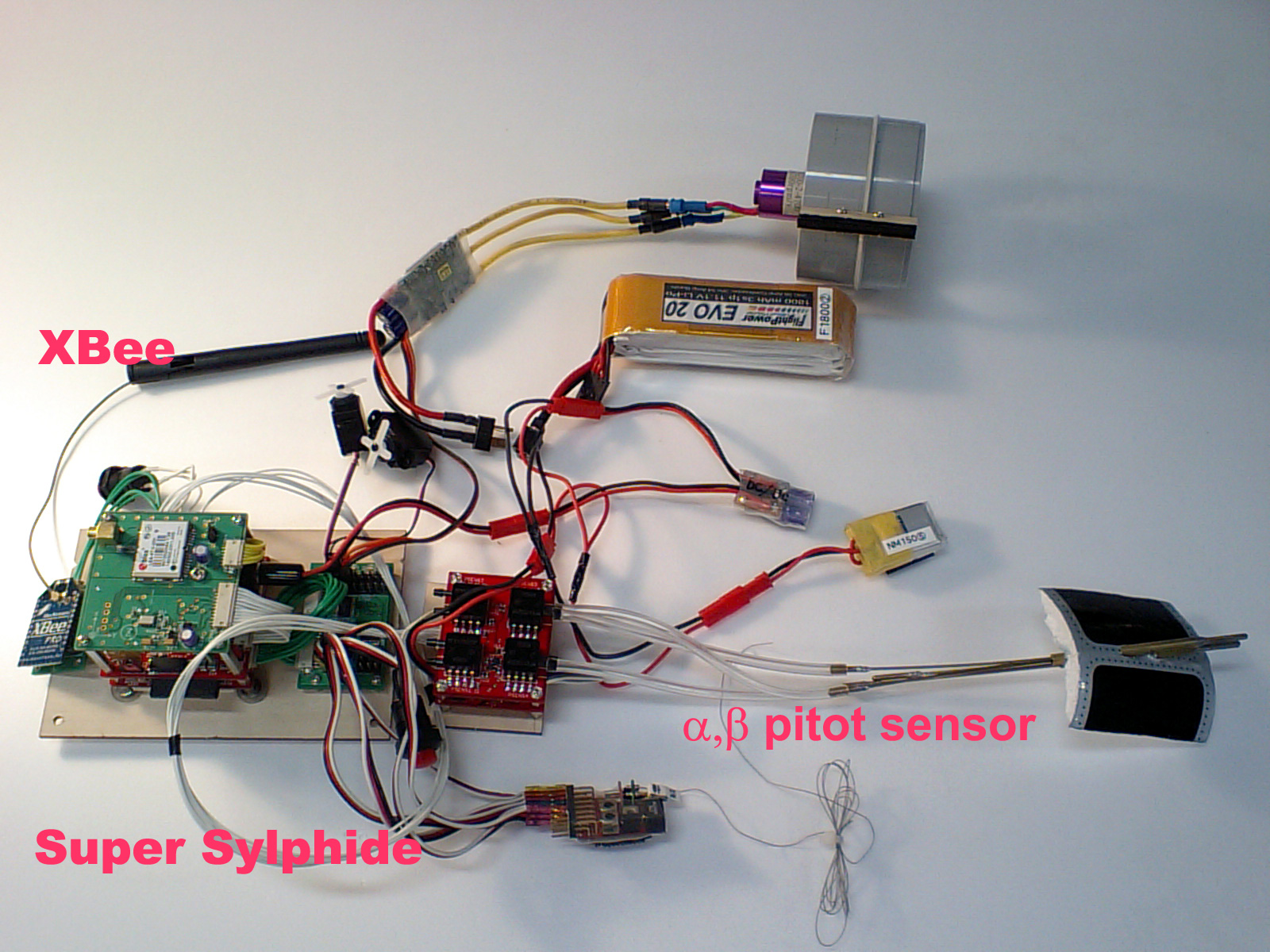
中には色々入っているんです(モーター類は一部省略)
変化したことといえば、ノーズ(先端)にH君作3孔ピトー管が水平、垂直方向に1本ずつ、計2本つくようになりました。この管から圧力をFreescale製のゲージ圧(差圧)センサに引き込み、同じくH君作のMSP430基板(MSP430自体は見えないですが、Super Sylphideのとなりにある赤い基板)で迎角と横滑り角、並びに対気速度をはかれるようにしてあります。Super Sylphideとの通信はSPIで行っています。
また、空中から地上への双方向リンクを確保すべく、XBeeの試験もはじめました。地上からデータを送信し、空中で受信、さらに受信したデータをそのまま空中から送信し、地上で受信、という簡単なロープバックテストをしてみましたが、パケットロスはほとんどなく良好な結果でした。障害物がほとんどないのが大きいのかもしれませんが、最大距離で100m超は通信できていることになります(オフレコがあるのですが、想像におまかせします)。写真にもあるとおり、アンテナは双方とも外付けバーアンテナを使いました。
※その後、積年(笑)のUSB周りの問題が、とりあえず解消しました。

コメント
>ya10さん
ありがとうございます。R/C機器との共存は大変です。地上のロボットなんぞはサーボが間接の数だけ入っているのでケーブルが更に山盛りですが、少ないといっても飛行機の狭いスペースに入れようとすると細い指の持ち主が重宝されるわけでして、是非とも改善したい部分であるのは間違いありません。
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。
搭載システム拝見しました.うちのシステムもそうですが,配線のゴチャゴチャ具合は開発段階は仕方のないことなのですね.とくにR/C機器と共存する場合は尚更ですね...他の所でもいろいろと苦労している点を見ますと,自分たちも頑張らないと!と思います.それでは今後のご活躍をお祈りします.
Posted by: ya10 : September 12, 2008 07:44 AM