Super Sylphide 進捗状況(29) -- Tiny Feather 開発中
オートパイロットシステム Super Sylphideですが、とりあえずやりたいことはほぼできているので、使い勝手を改善すべく努めています。こまでにおきた問題の中では以下のものが比較的重篤な問題であったので、これらを解消すべく基板や部品選定を含めて新たに設計しなおすことにしました。
- 高さが高すぎる。基板4枚の垂直積み重ね構成で立方体であるため、機体によっては入らない。平べったい形のほうが好ましい。(立方体にした理由はfuroのロボットで使われているシマフジ電機の組み込みコンピュータのオマージュであったりするのですが、それはおいておいて)
- 前項と関係するが、基板間のコネクタや配線で接触不良がでることがしばしある。そうなると原因の究明は困難なのでその意味でも枚数削減は必須
- 故障や暴走などに備える意味も含めて絶対に動くマイコンと挑戦的なことができるDSPという二段体制を引いてきたが、あまりメリットが得られない。しかも両者間の通信トラフィク増大が最近ネックになっている
- 問題というわけではないが高さを減らすことに関連して、最近は加速度計のみならず3軸1パッケージのジャイロ(例えばInvenSense ITG-3200やSTMicroelectronicsのLYPR540AH、sparkfunでも買える)も製品化されつつあるので、わざわざ基板を直交させて6自由度を作り出す必要がなくなりつつある
- 高さだけでなく縦横も小さくできれば応用用途が広がる
そこでまずは従来のDSPとマイコン部分の2枚基板を1枚にまとめた基板を設計しました。とりあえず基板のアートワークまで完了しましたので、さらしてみたいと思います。
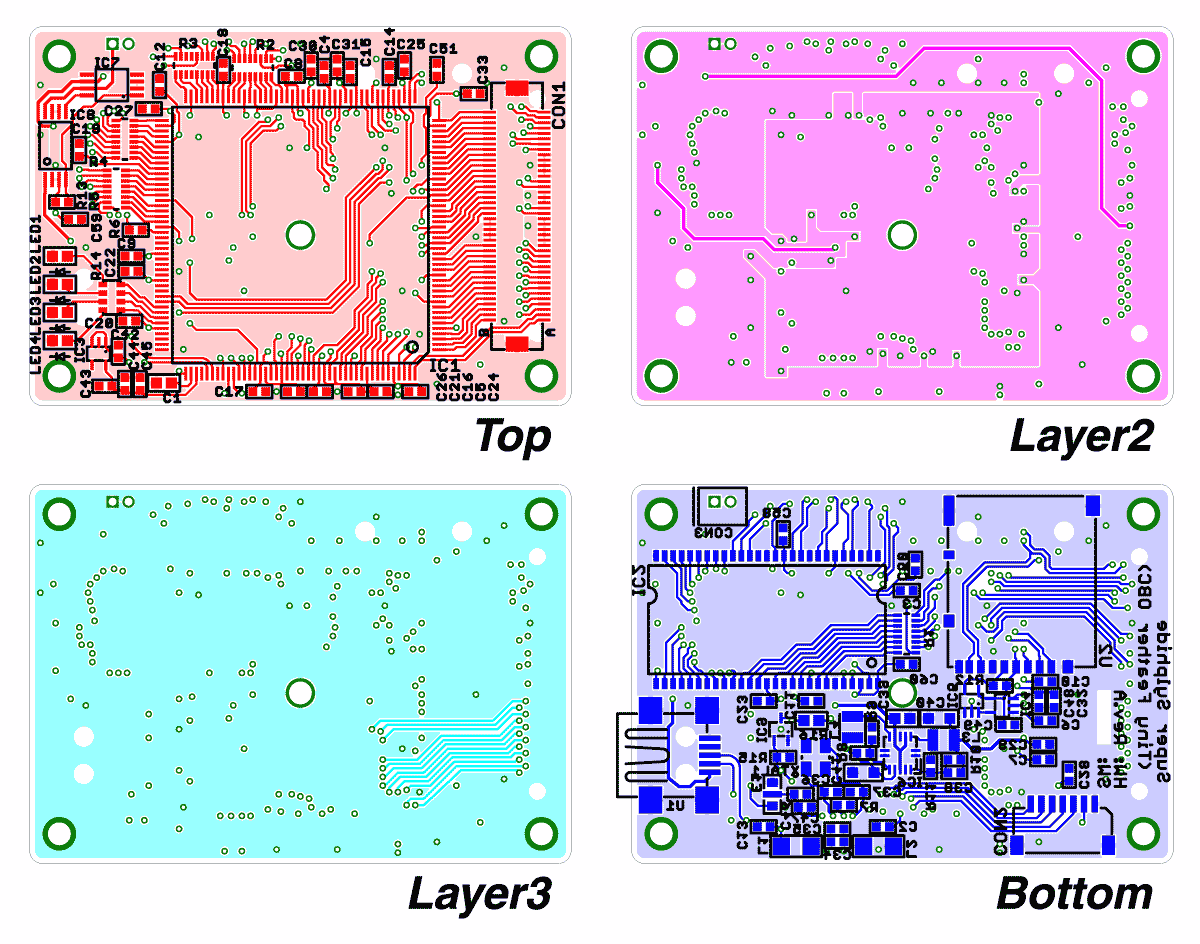
4層基板です。DSP1個(TI TMS320C6745)でこれまでの機能を任せることにしました。USBやSDもついています。大きさは2 x 1.4 in (約50 x 35 mm)で30%面積を削減しました。新旧対応表をそのうちつくりたいと思いますので、詳細はそのときにでも。
ちなみにですが開発中の新システムは、Tiny Feather(タイニィフェザー)という固有名称をSuper Sylphideシリーズにおいて与えることにしました。雪風でいうとMave(メイヴ)という名前が後継機種ですが、別のものに名前が取られてしまった関係で、違うところ(元ネタはロマサガ)からとってきました。選定基準は『空に関係していて、小さい』で、この名前としました。
※次の進捗状況は委託生産について書きました。
※※さらにこのTiny FeatherのJTAGデバックに関する記事も書きました。
※※※このボードに接続するセンサ+サーボI/F基板を設計しました。
※※※※この基板ですが、その後組み立て完了しました。
※※※※※ある程度、動作確認がとれたので設計データを公開しました。

コメント
>通りすがり@関西人さん
少なくともコーディングについては普通のC/C++(C++についてはテンプレートのサポートもいちおうあり)が使えるので問題ないです。浮動小数点DSPを選べば、わざわざ整数演算化(固定小数点)を意識する必要もなくPCのプログラムがほぼそのままで動きます。ただし開発環境をそろえるのがマイコンと比較すると金銭的にまだまだなんですよね…
ありがとうございます!!
SS通信のデコーダを従来PCベースでしていたのを
マイコンレベルでやりたかったので、
どのマイコンを使うかを悩んでいたので
ちょっと前に進めそうです。
>通りすがり@関西人さん
はじめはDSK(DSP Starter Kit)というのがよろしいかと思います。組み込みできるほど小さな基板ではないのですが、その基板専用ではあるものの開発環境一式がそれなりの価格で手に入るのでとっつきやすいと思います。TI製品だとTMDSDSK6713がいいんじゃないでしょうか。
http://focus.tij.co.jp/jp/dsp/docs/dspuniv.tsp?sectionId=155&tabId=1651
配線部分での接触不良トラブルから、基盤を減らして一体化したいのは非常によく分かります。
一方、GyroやGPS基盤の電気ノイズに起因するトラブル、
加速度センサの物理的振動に伴うトラブル、
地磁気センサの磁性物質や電流による磁界によるトラブル、
等には基盤が別々の方が対処しやすいですね。
防振や電磁シールド化、原因源から距離を離すなど。
>kentaさん
一長一短なのですよね。おそらくあげていただいた項目の中ですと防振対策が一番重要なのではないかと感じています。普段アルファゲルやベータゲルをはさむなどして苦労しています。
お久しぶりです。
5000シリーズと6000シリーズ両方買ったのですが、
とりあえず、6000で動かし始めてます。
ありがとうございました。
(5000シリーズは、よくわからない。。。
プログラムの書き方勉強しないとだめみたい。)
>通りすがり@関西人さん
僕も5000シリーズは使ったことがないのでわからないですが、6000シリーズは、低消費電力版のC674x、ARMと統合されたOMAP-L137,138やマルチコア版のC66xなど、元気なので覚え出は相応にあると思います。
お陰様で、C6000での実装は完了しました。
(32kFFT5段)
リアルタイム処理は、まだ出来ていませんが。……
STM32Fにこれから持って行きます。
(RT-OS なににするかまだ決めていません。)
>通りすがり@関西人さん
おめでとうございます! 次はSTM32F4ですね!! 僕もぼちぼち進めようと思っています。
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。
TI のTMS320Cのシリーズってプログラム作りやすいんですか?
Posted by: 通りすがり@関西人 : May 29, 2010 12:31 PMどうも、DSPってきくと尻込みしてしまいます。