December 05, 2006
室内飛行機用基板 Part.2
室内飛行機を自律飛行させる用の基板を以前つくりました(詳しくはリンク先の記事を辿っていってみてください)が、それのリニューアルをしてみることにしました。詳しい回路図や図面は、ある程度動作を確認してから公開する予定ですが、とりあえず恒例の基板画像です。
実はこの基板、当初の予定ではまったく室内飛行機と関係はなく、VHDLの練習基板を作ろうとしていたのですが、途中で使えそうだぞということに気づき、急遽室内飛行機用のおニュー基板として仕上げることにしました。そのためCPLDが鎮座しています。
CPLDが載っているので、前回の受信機からパルス入力を受け取る他に、同じくパルス幅で計測値を出力するラジコン用ジャイロ等の接続を考えています。なぜCPLDがここで必要になるかというと、それらのデバイスは受信機と違い、チャンネル間でパルスの出力されるタイミングがばらばらなので、前回の方法のように複数チャンネルを束ねてORをとるだけでは、マイコン内蔵のインプットキャプチャ機能を活用して複数のパルスを取り込む、という芸当ができなくないためです。
そこでCPLDを利用してパルスを整列させ、様々なデバイスのパルス計測を取り込もうと考えています。この方法よりも、CPLDで直接パルスを計測してシリアルコミュニケーション等でマイコンとやり取りする方法のほうが有効でしょうが、とりあえず今回はマイコン側の変更を最小限にとどめたかったので、前回の方法を拡張する形でCPLDの内部を作っていく予定です。

December 12, 2006
小亀基板 実装済み
小亀基板、実装してみました。

それにしてもSilicon LaboratoriesのC8051F340は小さいですね。これに発信器やらレギュレータやらUSBやらが内蔵されていると思うと、他にも何か小さいものを作ってみたくなります。

December 16, 2006
Pulse Repeater
室内飛行機基板を新たに作ったわけですが、そこに内蔵されているCPLDのロジックを設計してみました。この記事ではその中の肝と思われる、複数パルスを順番に整列させる部分の話です。パルスをなぜ整列したいのかというのは、前述のリンク先ならびに『ラジコン受信機とマイコンの接続』という記事で察してください。
どのようにその機能を実現したかというと、入力されたパルスの時間長さを計測しておいて、外部から『パルスください』信号がきたときに同じ長さのパルスを出力する下位機能を、カスケード接続することによって実現しました。この下位機能をPulse Repeaterと名づけました。
Pulse Repeaterの解説図やVHDLコードは続きをどうぞ。
※2007/1/21 これだとうまく動かないことがわかり修正しました。コードではwire_in_risenという項目が増えています。

December 21, 2006


December 25, 2006
DSP基板+小亀基板+センサ基板
こんな感じになりました。
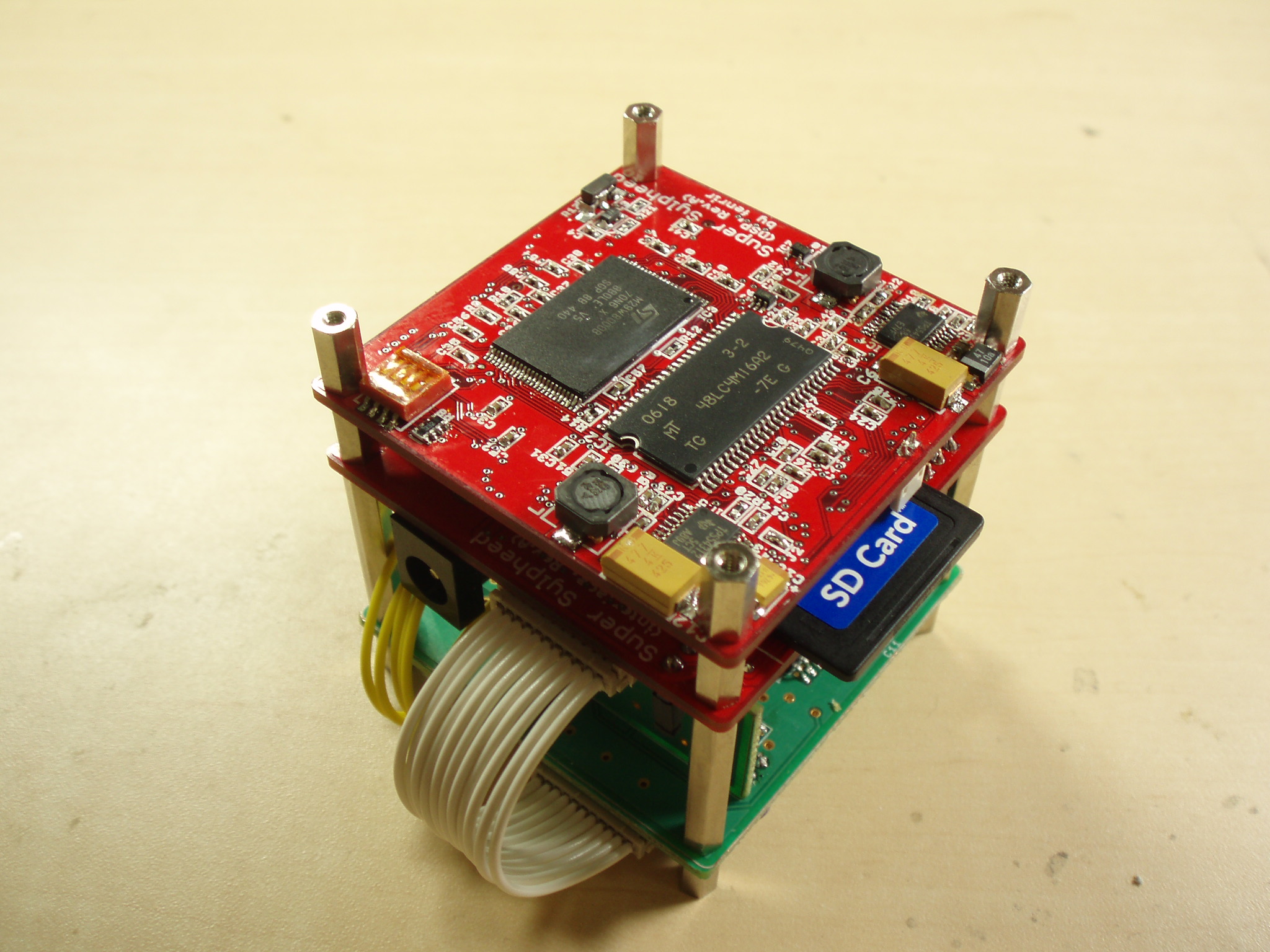
本来と逆さまですが
上がDSP基板の裏面(電源部+RAM+ROMが見えています)、次が小亀基板(SDが出ています)、一番下の緑色の基板が小々亀基板のセンサ基板(加速度計3軸+ジャイロ3軸+GPS)です。
これからファーム作りという感じです。あと、この状態では航法機能しかもっていないので、FPGAとモデムを足してオートパイロット化を狙っています。しばらくは書類作業があるので、なかなか進まないと思いますが。
※開発コードはSuper Sylphide (スーパーシルフィード)です。
※2007/1/14 進捗状況(1)を書いてみました。

December 26, 2006
Super Sylphide -- an Autopilot System for Small UAVs [English version]
(the last update is Apr. 2011.)
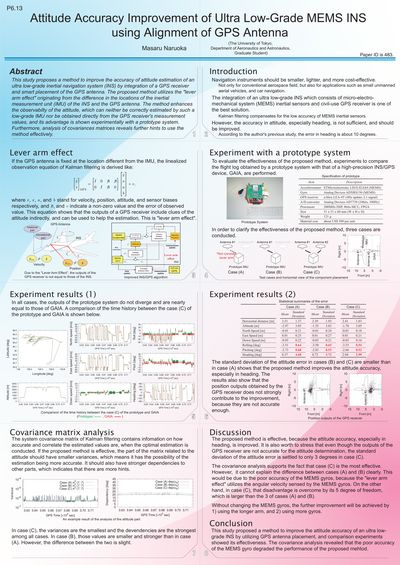
What's "Super Sylphide"?
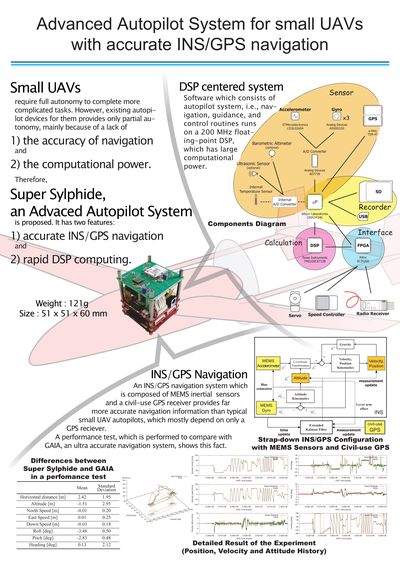
"Super Sylphide" is a novel autopilot system for small UAVs (Unmanned Aerial Vehicles) whose weight is defined as about one or two kilograms. These UAVs are developed actively especially in the aeronautics research field. This is because they have potential to achieve many practical tasks such as autonomous disaster monitoring, and they are so easy to handle that they do not require runway to take off.
However, small UAVs have not been capable of desirable autonomy and intelligence yet. In other words, what they can do now is only to take aerial photos along a pre-planned path, and they have to be helped by a human operator in many situations. This is mainly due to their strict limitaions on the payload weight, size and cost. Especially, it is a serious problem that navigation devices which are more accurate than a stand-alone GPS receiver, and powerful processors to run more robust but complicated algorithms than the classical PID are not installed. Therefore, the development of "Super Sylphide", whose features are to provide accurate navigation data with the INS/GPS integration, and DSP computing for large calculation capacity, is started. The detail is in the following brochure.
Related Resources in English
There are several outcomes in the cource of the development. The followings are the related articles which are written in English (the oldest is the top).
- "A Powerful Autopilot System for Small UAVs with Accurate INS/GPS Integrated Navigation", 2007 JSASS-KSAS Joint International Symposium on Aerospace Engineering, Kitakyushu, JAPAN, 2007, Paper 005
- "High performance navigation system with integration of low precision MEMS INS and general-purpose GPS", Transactions of the Japan Society for Aeronautical and Space Sciences, pp.284-292, Vol.50, No.170, 2007.
- ICAS 2008, Alaska, Paper ID is 483.
- 2009 GCOE Workshop, Super Sylphide can be used as the avionics for the system identification of small UAVs.
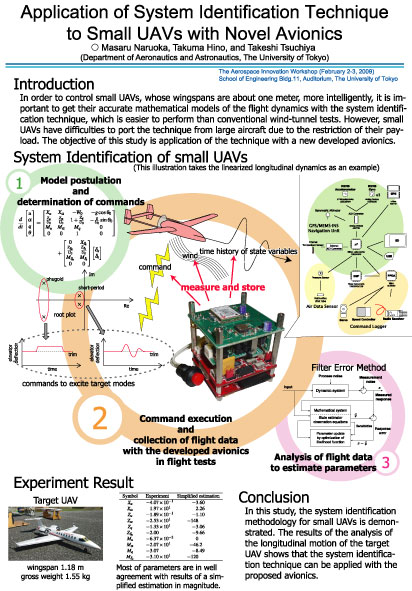
- "System Identification of Small UAVs with MEMS- Based Avionics", AIAA-2009-1907, AIAA Infotech 2009.
Progress reports
Short progress reports with images, and circuit shematic are available in this site. They are originally in Japanese, but you can get machine translation versions when the right upper button "English" is clicked. The following is the list (the latest is the top).
- Debuging Tiny Feather with low-cost JTAG emulator
- Production model of Super Sylphide
- Compact Super Sylphide = Tiny Feather, DSP borad, IMU and Servo I/F, and Air Data Sensor
- New board with Hi-maneuver sensors
- Flight Expreiment and a movie of Dutch Roll
- Solution of communication problem between C8051 and DSP via SPI with McBSP and EDMA
- History to completion of developement of the navigation routine which runs on a DSP
- Inside the experimental R/C airplane
- Idea of still camera module
- Experiments with R/C airplane
- I2C implementation for FPGA
- I/O expansion with FPGA
- I hate Windows because a USB composite device is not recoginized correctly
- Cooperation between CPU interrupt and EDMA functions in the transmittion via McBSP
- Maintain time stamps in case of GPS outages
- Bake a ROM for the DSP board
- Matrix algebra libraly for C6713 DSP (revised version)
- How to transmit / receive multi-words packets with McBSP
- communication via SPI with DSP/BIOS provided by TI
- Calibration of pressure sensors
- Annoying cables
- DSP PCB schematic and layout
- Debugging with the DSP IDE
- Connection to R/C servo actuators
- About opensource C compiler -- sdcc
- A sense of debugging
The derivation of the name "Super Sylphide"
The name "Super Sylphide" is derived from the seriese name of aircrafts which stars in my favorite Japanese scientific novel "Sentō Yōsei Yukikaze" written by Kanbayashi Chōhei. The novel is made into anime, and probally available in English.
Any comments?
If you have any questions or comments, please send me an E-mail (the address is the right lower one) with the keyword "Sylphide" included into the title.

| « | December 2006 | » | ||||
|---|---|---|---|---|---|---|
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 | ||||||