June 15, 2006
機体搭載基板
室内で飛行する模型飛行機を自律飛行させる件ですが、地上側はプロポをPCからコントロールできるようになったり、と準備が着々と進んでいるので、機体側の開発に移行しています。
機体側には壁や地面などの障害物までの距離を測定するための超音波センサと、重力方向をみることによって姿勢を把握するための加速度計を搭載します。また、それらの情報をもとに誘導ならびに制御を行うためのマイコンを搭載します。
詳細は続きをどうぞ。
まず構成部品の詳細ですが、あまり特殊な部品で構成すると、色々と時間がかかってしまうため、調達が簡単な部品で構成することにしました。本来ならば、機体に搭載するということで、できるだけ軽い部品で構成したかったのですが、プロジェクト期限が最大でも7月いっぱいと時間がないので妥協しました。
ということで調達は秋葉原でできる部品に限りました。選定の結果、秋月電子で購入できる超音波センサ、3軸加速度計、H8/3694F マイコン基板を採用しました。
超音波センサは発振回路などの周辺回路が必要なので、PIC16F628Aを使用してモジュール化することにしました。手配線でも良いのですが、配線が面倒、また重量を多少でも軽くしたいので基板をおこしました。発振回路自体は2005年10月のトラ技に掲載されていたものと同じですが、モジュール単体として出来るだけ取り回しがし易いよう、PICのTX/RX/INT端子で外部と通信できるようにしました。
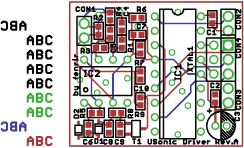
Eagleの回路図、基板レイアウト。大きさは31 x 26[mm]。
また、加速度計はH8/3694Fに内蔵されているA/D変換を利用して量子化を行い、誘導・制御に利用します。従って加速度計は、マイコン基板のマザーボードを作り、そこに搭載するようにしました。このマザーボードは今回の制御の中心部となる部分で、他の部品との接続を担当します。例えば、基板の左側は、下が無線の受信機と、上がサーボやスピコン(モータの制御モジュール、スピードコントローラ)と接続します。
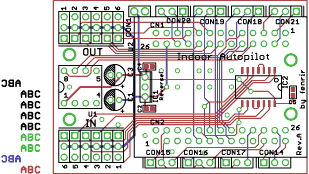
Eagleの回路図、基板レイアウト。大きさは60 x 41[mm]。
基板は例によってOlimexに発注しました。できあがるのが楽しみです。現在H8/3694Fのコーディングを開始しました。
※その後、基板が届きました。

始めまして、UNA3です。
非常に近いトライをされている方がいて、びっくりしました。
私は飛行機に関しては以前から仕事
http://www.ac-olympos.com/
趣味
http://www.una3.redirectme.net/SuzukiBlog/mt/blog01/
で続けてきたので、ある程度は自力解決できる面があります。しかし今回、フライングロボット(電子回路ができないと話しにならない)にチャレンジしています。
超音波送受信回路で玉砕している状態です。
あなたの、回路図を参考にしたいのですがよろしいでしょうか?
また、図面ファイル(.sch)はどのようなソフトで参照できるのでしょうか?
よろしくお願いします。
UNA3さん、こんにちは。
メーヴェに関わられているのですか、凄いですね!! もし何かお手伝いできるようなことがありましたらお声をかけていただけるととても嬉しいです。
質問の件ですが、同じことをしようと考えている方に少しでもお役に立てたらと思い、いろいろと公開していますので、どうぞ自由にご利用ください。もしライセンス等を厳密に気にされているようでしたら、右の『サイト内著作物のライセンス』を参考にしてください。
回路図やレイアウトは、EAGLEというソフトで作成しています。次のサイトの[Download]から無償版(作成できる基板にいくつか制限ありバージョン)をダウンロードできますので、このソフトで開いてみてください。
http://www.cadsoftusa.com/
EAGLEをダウンロードして回路図見ることができました。
受信回路はOPアンプ2段なのですね。
送信回路は何も増幅しないのですね。
受信回路の性能が良いから、弱い超音波でもOKなのでしょうか?
後、送信回路の超音波センサのマイナスがGNDではなくて、PICに接続していますね。どのような発信ロジックなのでしょうか?
私の回路は「たのしくできるPIC電子工作」を参考にました。
http://www.una3.redirectme.net/SuzukiBlog/mt/archives01/000706.html
受信回路は「トランジスタ+コンパレータ」を使った回路なのですが、OPアンプ方式の方が利点が多いのでしょうか?
質問ばかりで申しわけありません。
Posted by: UNA3 : July 1, 2006 08:22 AM>UNA3さん
こちらもトラ技の回路をほぼ完パク(ブレッドボードでのテストは成功)しただけで、他の回路と比較したことはないので、はっきりとしたことはいえませんが、いちおう返答してみたいと思います。
全体の話ですが、送信信号を大きくして受信を楽にするよりも受信の感度をあげたほうが電気的にお得だと思います。
そのコンセプトのもとでの話ですが、TX側にトランジスタが入っていない理由は、おそらくPICは普通のマイコンに比べて外部素子のドライブ能力が高い(流れる電流量が大きい)ので、これで十分ということだと思います。
受信信号は極めて弱いので、電圧増幅してから信号検出を行っています。こちらではOPアンプ2段で100倍増幅してから最後のトランジスタで検波(超音波を受信するとH→L)しています。
送信側の片側がGNDに落ちていない理由ですが、よく覚えていません。片側にPICでパルスを40KHzで送っているだけだったと思います。
小さくしたいのなら全て表面実装部品を使って両面実装すれば、もの凄く小さくなります。今回作った基板は組み立てる人に配慮してこの大きさになったのですが、同じ構成でも極限までねばれば20x20[mm]以下になると思います。
Posted by: fenrir : July 1, 2006 12:28 PM