September 02, 2009
猫カメラ Ver.2 基板設計完了
いつも見に来てくださっている方々には、あまり更新がないのも申し訳ないので、手持ちの近況ネタでサイトを更新することにします。前からいっていた新バージョンの猫カメラの基板を発注しましたので、その基板レイアウトの画像を張っておくことにしました。
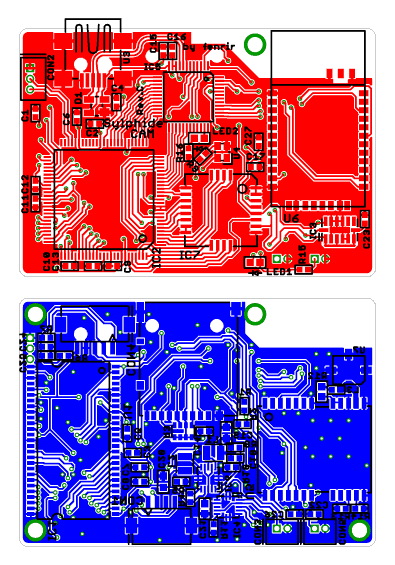
変更点はカメラがVS6724になったことです。他の部分は特に変更ありません。
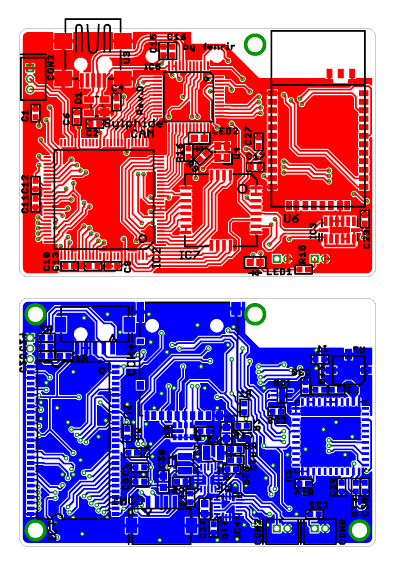
実はもう1つ、GPSが違うバージョンを企画してみました。こちらは以前の高級GPSであるu-blox NEO-5Q(およそ100ドル)とは違い、sparkfunで40ドル未満で買えるSkyTraQ Venus634FLPxを採用しました。Venus634FLPxはアクティブアンテナの給電回路が外部に必要なため敬遠していたのですが、価格が安いということで今回思い切って採用してみることにしました。
なお新基板はpcbcartで製造を頼みました。しばらくすると赤色の基板が手に入る予定です。
※(2010/5/18) 完成したものをMake Tokeo Meeting 05で展示します。

September 10, 2009
北岳 2009
先日国内で2番目に高い山の北岳に登ってきました。台風で一度は延期した企画のリベンジですが、今回は天気に恵まれ大変楽しい山行となりました。ルートは広河原~北岳~間ノ岳~農取岳~奈良田の2泊3日コースです。

間ノ岳方向から北岳。Xacti CA9で撮影。
雲が多かったため、2001年のように富士山が見えなかったのが、少しばかり心残りです。
おまけ企画として、測量のために剱岳に決死覚悟の登山をした話の映画『点の記』が今年公開されたこともあり、現代の最新技術をもって測量の真似事をしてきました。お得意の自作GPSロガーの出番です。

こんな感じで計測しました
計測データ kita2009.ubx(フォーマットはubx)を公開します。計測条件は、受信機にu-blox LEA-4Tを使用、北岳山頂の三角点におけるCarrier PhaseやDoppler等の生データを4Hz約15分間静止測位しました。またアンテナの設置環境は上の写真の通りで、場所が場所だけに時々アンテナが人の影に入ってしまっています。興味がある方はambiguityを解くなど遊んでみてください。後日、より標準的なフォーマットであるRINEX形式でもデータを提供しようと考えています。
計測の際、周囲にいる方に奇異の目を向けられたりした(笑)のですが、GPSですよ、というと安心していただけました。『点の記』の頃は測量をするにも色々と周囲の理解を得るのが大変だったのではないかと思いますが、GPSの知名度に感謝様様です。
※(2009/09/18 追記) 自作コンバータubx2rinexのバグを出し切っていないため不備があるかもしれませんが、RINEX形式でもデータを提供したいと思います。Observation形式の観測データとNavigation形式のエフェメリスデータ。
※※(次の三角点データ) 日光の赤薙山の三等三角点です。

September 17, 2009
Super Sylphide 進捗状況(26) -- 飛行試験でDutch Roll
オートパイロット装置 Super Sylphideですが、今まで数度、飛行機を借りて、航法機能の精度を確認する飛行試験を行ってきました。航法機能というのは、カーナビの飛行機版で、『どのような場所を飛んでいるのか』や『どんな格好(姿勢)で飛んでいるのか』といったことがわかる部分です。カーナビだと東西南北の2次元情報ですが、飛行機は3次元空間を移動するので遥かに高機能です。
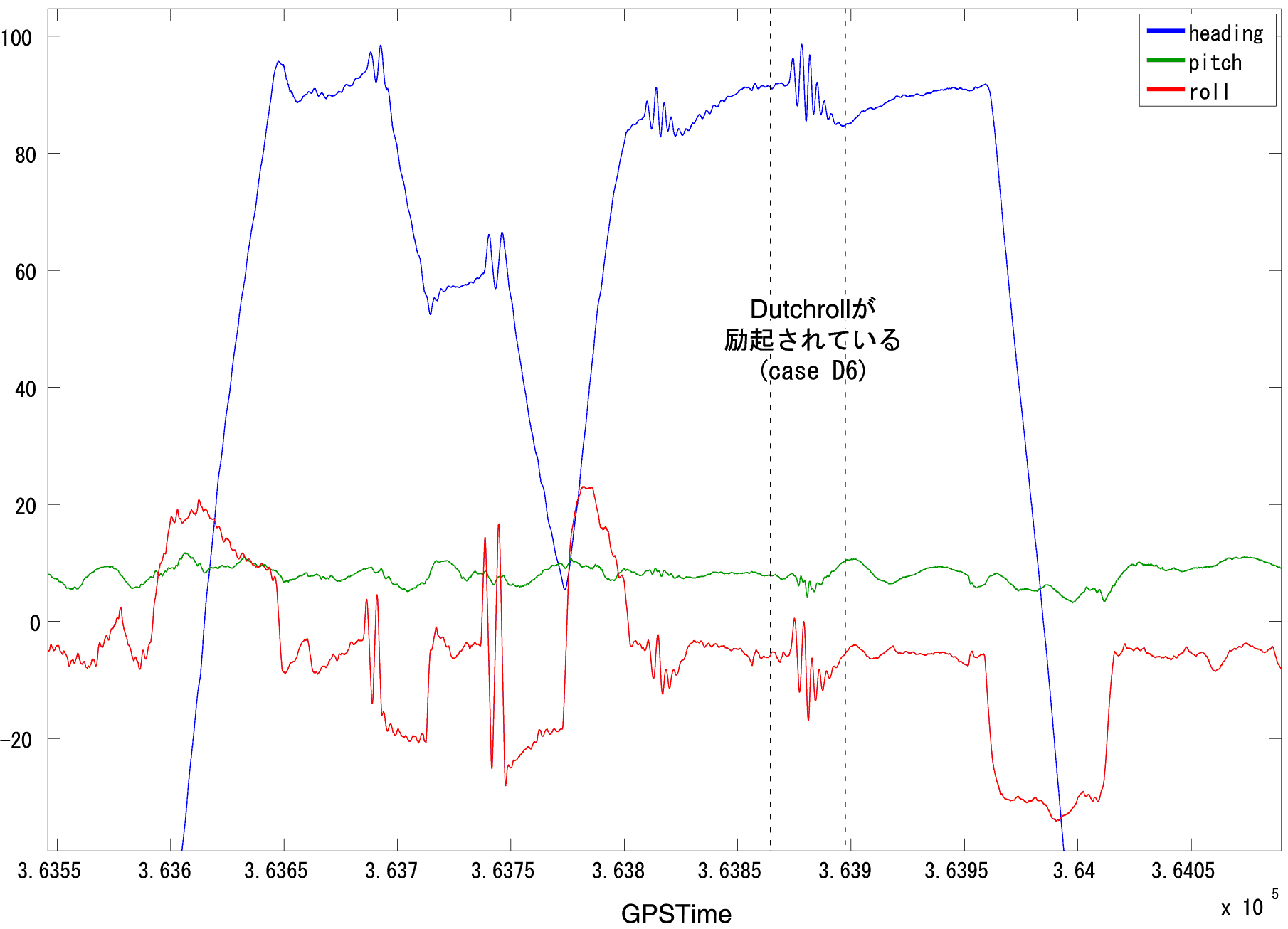
そんな飛行試験の中で、最近面白い映像がとれたので紹介しようと思います。飛行試験では、飛行機の特徴的な飛び方をして戴いて、それをSuper Sylphideで捉えるということをしています。今回紹介するのはとても気持ち悪いダッチロール(Wikipediaの解説『ダッチロール』にあるアニメーションがわかりやすい)という飛び方です。まずは映像をどうぞ。
これをSuper Sylphideで捉えたのが以下のグラフです。このグラフは航法情報のうち姿勢情報、つまりヘディング(東西南北のどっちを向いているか)、ピッチ(水平線に対してどれだけ機首が傾いているか)、ロール(左右でどの程度傾いているか)を示したものです。ダッチロール中はヘディングとロールが連成するのですが、その様子を捉えることができています。
試験に使用した飛行機の写真も貼っておきます。宇宙航空研究開発機構(JAXA)のBeech QueenAir(B65)です。

格納庫から出た直後のQueenAir。
飛行試験は飛行機に乗れるのでとても楽しいです。しかも飛んでいる間に自分の機材で色々なことがわかるのが面白いです。
※その後、より強い力、より速い回転を捉えることができるセンサを搭載した基板を新たに設計しました。

September 24, 2009
Super Sylphide 進捗状況(27) -- 高運動性対応基板
オートパイロットシステムSuper Sylphideですが、最近搭載する乗り物の中には高速で回転するものがでてくるようになりました。元々は模型飛行機用として設計したので、そのような乗り物に載せるとセンサが振り切れてしまいます。そこで新たにより広い範囲の力や回転を取ることができるセンサを搭載した基板を新たに設計してみました。例によって基板レイアウトの画像を貼っつけてみます。
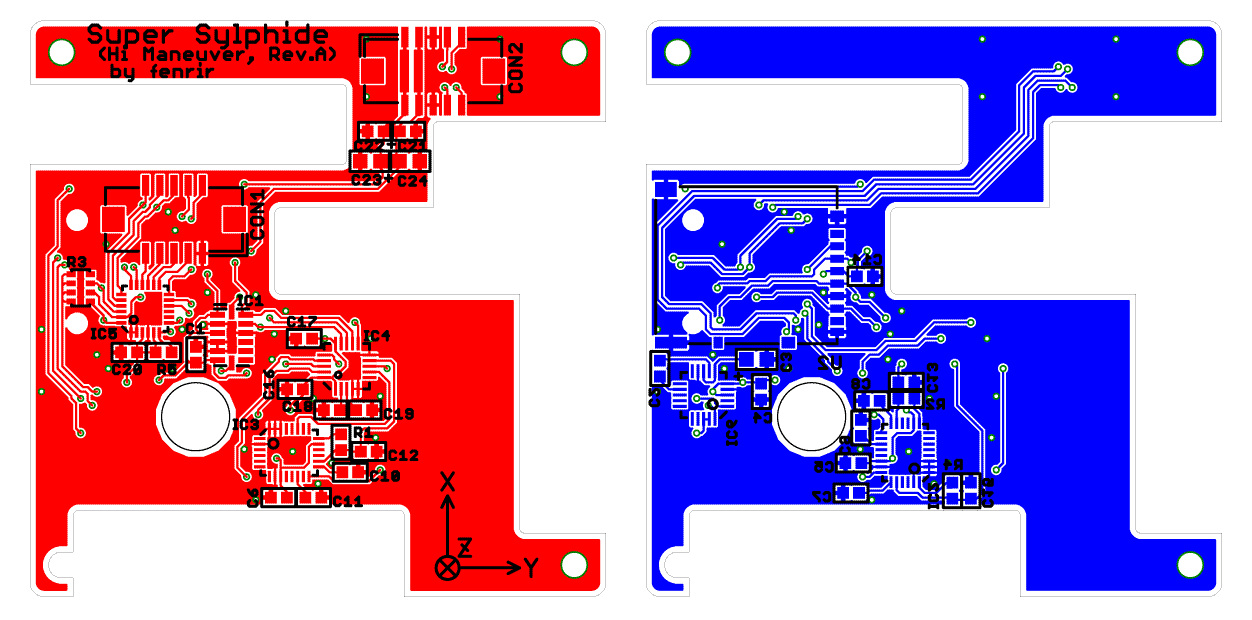
2層基板で、左(赤)が表、右(青)が裏。
メインのセンサ部品の紹介です。加速度計として最大16Gまで計測可能なAnalog Devices ADXL345(3軸1パッケージ)、ジャイロには2000deg/secまで測れるInvensense IDG-650(X,Y軸)とISZ-650(Z軸)を、さらにおまけで3軸の磁気コンパスHoneywell HMC6843を搭載しています。高速でデータをサンプルする必要もあるかと思い、この基板専用のマイコンSilicon Laboratories C8051F921とMicroSD、ADCとしてAnalog Devices AD7689(16bits 250KSPS 8ch)を搭載しました。C8051F921は2系統SPIが取れるので、Super Sylphide本体とSPIで通信することを想定しています。
ところで基板が変な形をしていますが、これは既存のシステムの上に無理やり基板を載せようとした結果です。切り下記の部分にはちょうど既存のシステムのコネクタ類や背の高い部品がはまります。部分的にとても細くなっているので、変な力をかけて割らないよう注意しなければなりませんが、大きさ(2 inch = 約5cm 角)が変わらないことを優先しました。
※ その後、DSPのブートに関する記事を書きました。

| « | September 2009 | » | ||||
|---|---|---|---|---|---|---|
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | |||