October 06, 2010
AR.Drone モータまわり
最近話題の空飛ぶおもちゃAR.Droneを買ってみました。iPhoneやiPod touch、iPadなどでコントロールできるWiFi接続のカメラ付クワッドロータ機ということですが、2-3回の練習で意図どおりに飛ばすことができ、とてもよくできているおもちゃだと思います。
さて僕が興味があるのは、飛んで楽しいなぁ、というところで留まるわけではなく、中身まで弄り倒すことなので、早速分解をはじめてみました。最終的には僕が作成しているオートパイロットシステム Tiny Featherと組み合わせて屋外で自律飛行させたい、と思っています。
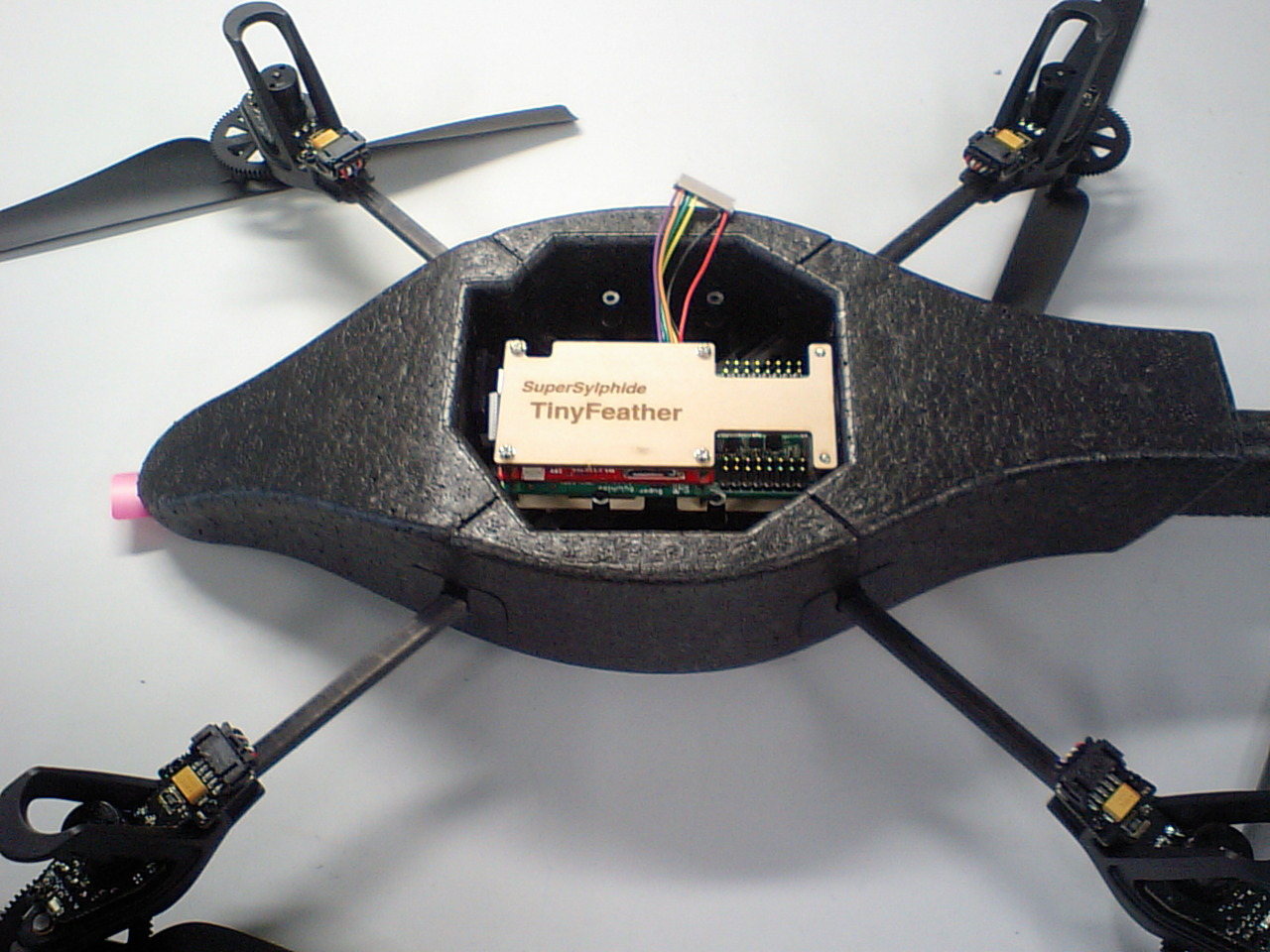
近い将来はこうなる!?
現在特に興味があるのはモータやバッテリーなどの動力まわりです。調べてみた結果をいくつか書いておこうと思います。モータは全部で4つ、種類がブラシレスであり、それぞれにスピードコントローラ(スピコン、ESC)と呼ばれる回転数を制御して推力を調整するユニットがつけられています。さらにモータの出力はプロペラをそのまま駆動するのではなく、ギア比68:8でギアダウン接続されています。
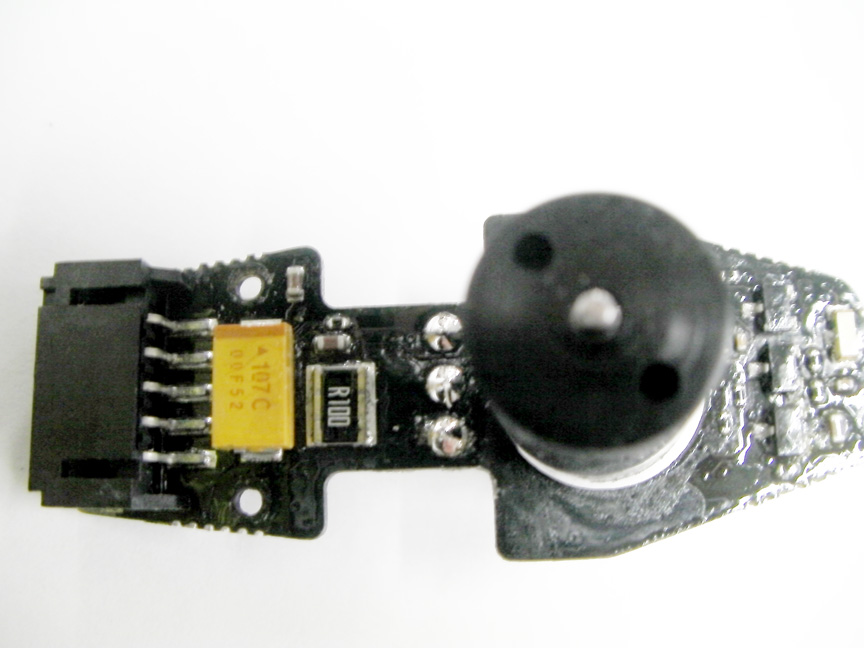
全体像(プロペラとは反対方向より)
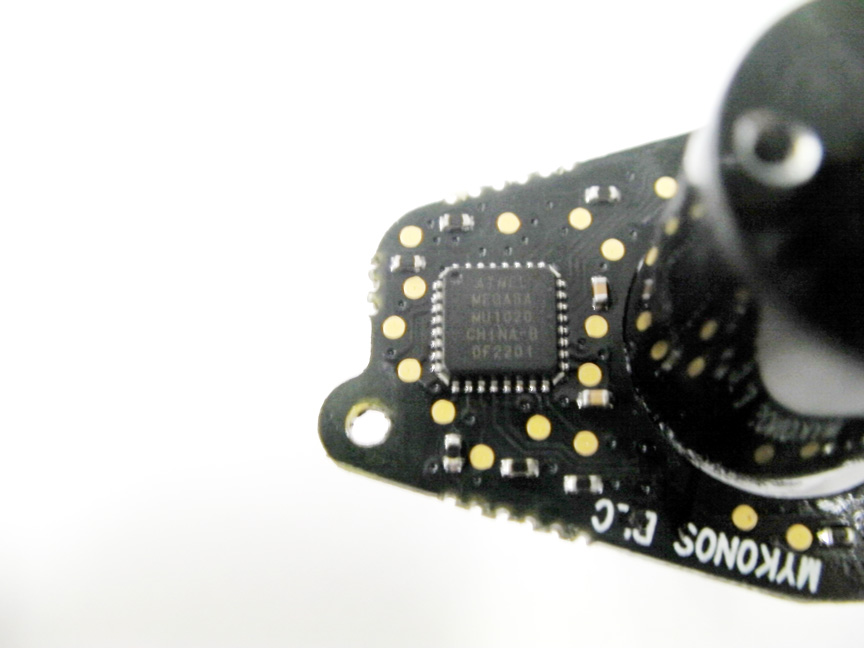
スピコンの制御部はAtmel ATMega8a
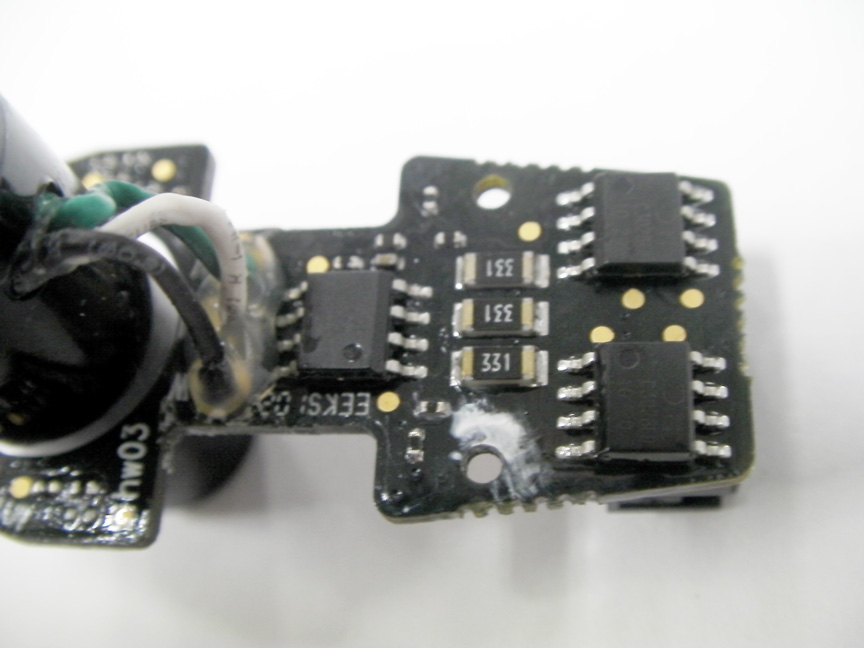
Power MOSFET(Diodes DMC3028LSD)が3個 (@munefさん、ありがとうございます)
中央のコントローラとスピコンは5本の線で接続されています。そのうち2本はVCCとGNDなので、残り3本のプロトコルがわかれば、中央をTiny Featherに置き換えることが確実に可能になります。これについては現在調査中です。
また純正のバッテリは、LiPo 3セル(11.1V) 1000mAh 10C discharge 外形 72x39x24mm 重さ105gでした。コネクタは@sonson1919さんの助言によるとJST ELコネクタでは、とのことで、現物を取り寄せて検証しようと現在していますした結果、そのとおりでした。
※配線について更に調べてみました。スピコンに繋がる5本の線ですが、以下のような配線のようです。
- 1ピン バッテリからの直接給電
- 2ピン ATMega8a用のVCC(5V)
- 3ピン ATmega8aのPD0(RXD)/PD1(TXD)の両方に接続
- 4ピン ATmega8aのPC3(ADC3)に接続
- 5ピン GND
3ピン、4ピンの波形が気になるところです。
※その後、バッテリを増強しました。

October 14, 2010
W42CA バッテリ交換
スマートフォンって何それおいしいの? 状態のケータイからは遠い世界で暮らしている僕ですが、自身のケータイ W42CA、いわゆるGショック携帯はとても気に入っています。はからずも衝撃試験や水没試験を主に登山で繰り返しても、びくともせずに動いています。
しかしながらバッテリはへたれるもので交換とあいなりました。せっかくなので大容量バッテリに交換しました。現行の720mAhから1200mAhに増加です。

つけたバッテリ
これにはちょっとしたカラクリがありまして、W42CAの業務用版 E03CAのバッテリ 03CAUAAを細工していれました。誤挿入防止用のツメが邪魔(写真の赤丸部分)なので、それを削って装着しています。
以前にもまして重くごつくなりましたが、もともと重くてごついので気にしていません。安心して山にも持っていけるというものです(防水とライト機能が特に便利)。

October 20, 2010
Super Sylphide 進捗状況(35) -- Tiny Feather ADS ひとまず完成
オートパイロットシステム Super Sylphideの次世代型 Tiny Featherには空気に関する相対的な情報(対気速度や迎角など)を取得するためのAir Data Sensor(ADS)があります。設計から時間が少し経過してしまいましたが、組み立てをしファームウェアを整備して、ひとまず使えるような状態にすることができました。
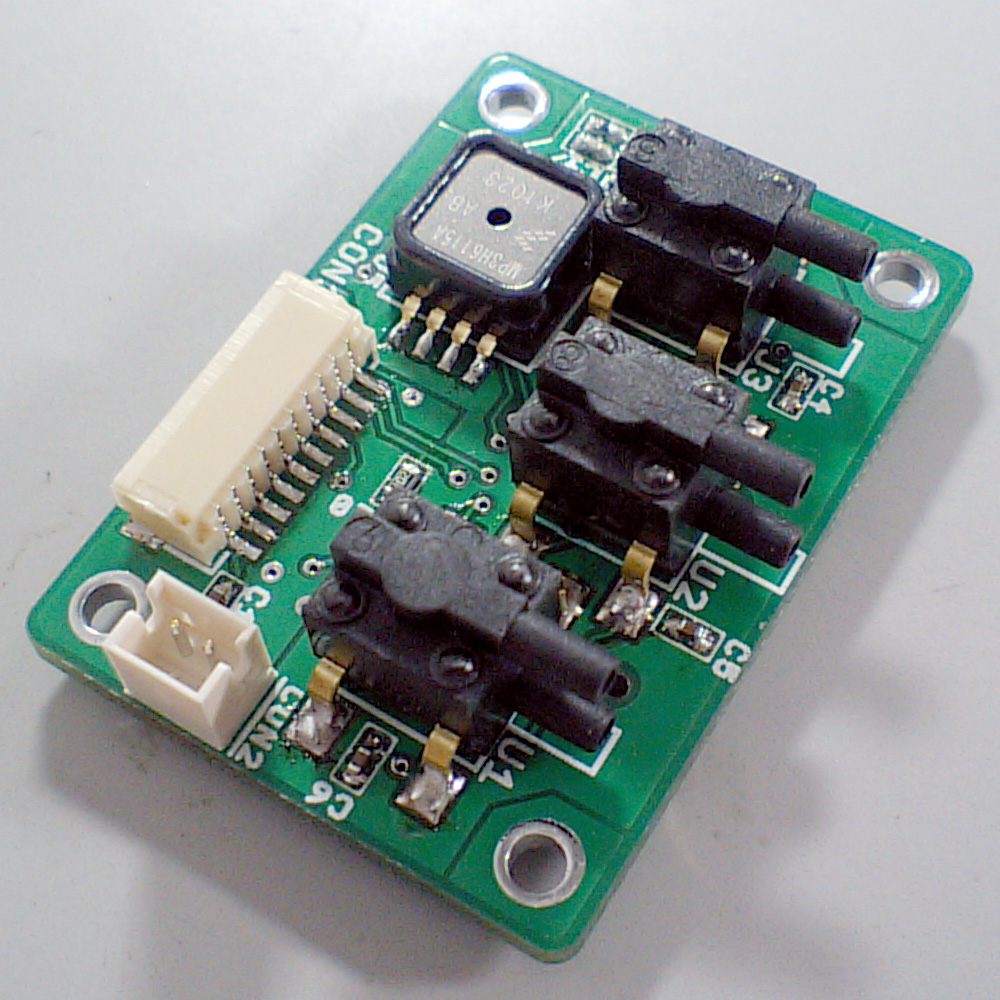
写真に見える3つの黒いセンサは差圧(ゲージ圧)センサで、ピトー管と接続します。銀色のセンサは大気圧を測定するためのものです。
とりあえずのファーム(随時アップデートする予定)は、このあたりにおいておきます。C8051F350の24bit ADCの使い方の参考になるかもしれません。
ちょっと困ったことがありまして、裏面にmicroSDのスロットを搭載しているのですが、microSDを便利に利用できなさそうです。というのもマイコンのROM容量がとても少なく(8KB)、ファイルシステムが載らない可能性がでてきました(計画ミスです…)。ChaNさんのPetit Fatfsの搭載を考えていましたが、それでも8bitマイコンが対象ということもありコード効率が悪く、苦しい状況にあります。
通常運用ではTiny Featherにデータを何らかのI/Fで転送してしまう(今のところUARTを考えています)ので、単体でログをとれる必要はありません。しかし、ADSのみの単独運用もできると便利なので、なんとかしたいところです。 ということで、今後の展開を考えてみました。
- microSDにファイルシステムを載せないで運用する(専用の読み出しソフトを作る必要あり)
- microSDの形状の何か(例えばSPIROMを載せる)を作成して活用
- 単体運用をあきらめる
1が王道のような気もしますが、個人的には2のmicroSD型何かを作る(SPIバスのアダプタとして使う)が面白そうだと感じています。
※次の進捗状況は委託生産品のハードウェアが完成したことについてです。
※※ようやくこのADSもTiny Featherの一員として動作をするようになりました。コード類は最新の状態にしてあります。

October 30, 2010
Super Sylphide 進捗状況(36) -- Super Sylphide 委託生産品での改善点
以前、オートパイロットシステム Super Sylphideについて、委託生産の可能性を検討しましたが、検討の結果、委託生産を行うことになりました。当時関心を寄せてくださった方にはメールにてご案内さしあげましたが、その節はありがとうございます。このたび進捗として、ハードウェアがほぼ完成したことをお知らせしたいと思います。現在、ファームウェアやキャリブレーション作業を準備しています。
今回の記事ですが、オリジナルから委託生産品の変更点、もとい改善点をまとめておこうと思います。これは使い勝手を考慮したもので、いわゆる"痒いところ"に手を入れました。写真とともにその改善点を紹介したいと思います。写真は全て左がオリジナル、右が委託生産品です。
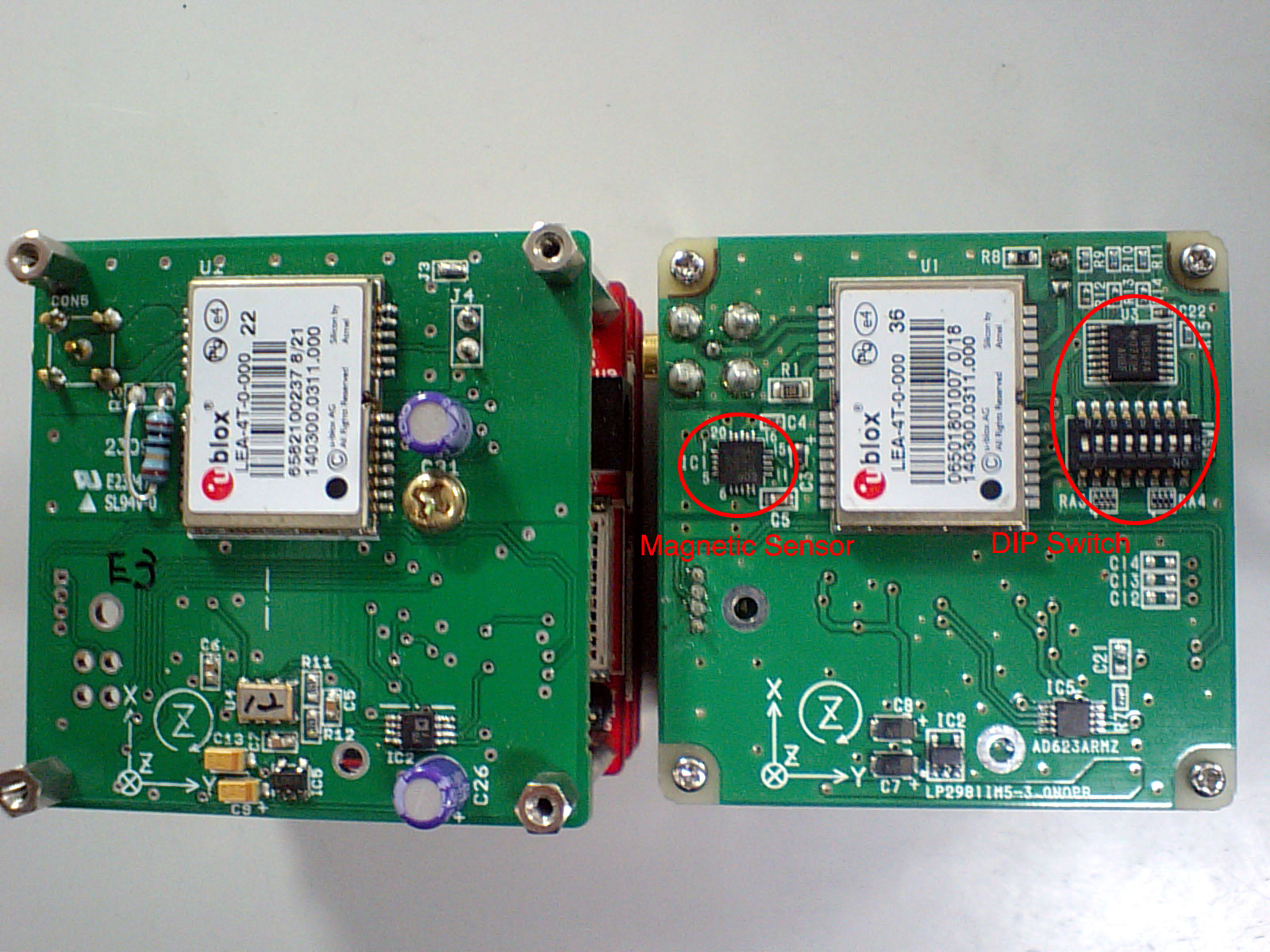
上からの写真
まずは上からの写真です。委託生産品には3軸磁気センサ(Honeywell HMC5843)とDIPスイッチが増設されています。磁気センサは地磁気をもとにヨー角をできるだけ正しく推定するためのものです(実際のところ、電動飛行機では電流が発する磁界の影響を受け、ほとんど役に立たないのですが…)。DIPスイッチはログの記録有無やUSBの機能など、設定を簡単に行えるようにするために搭載しました。さらに細かい点ですが、作業中に引っ掛けてしまいそうなコンデンサなどの背の高い部品は全て裏面に配置しました。
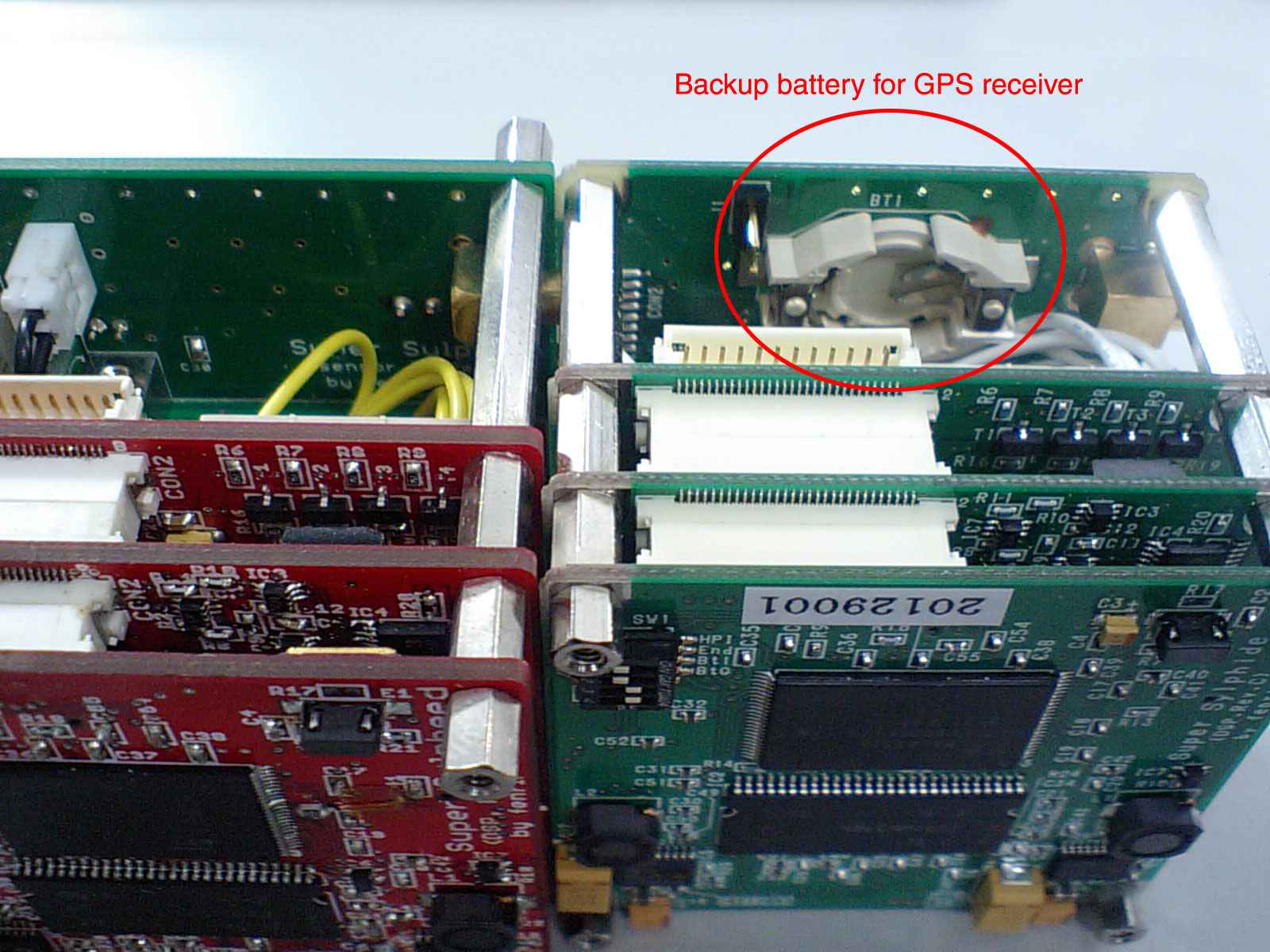
+X方向から
続いて側面からの比較その1です。委託生産品ではGPS用のバックアップバッテリを搭載することにしました。バックアップバッテリがあると、GPSの時刻や衛星軌道情報が無電源時にも保持され、電源投入から測位可能になるまでの時間が大幅に短縮されるようになります。オリジナルではこのバックアップバッテリを外部に接続できるようにしていたのですが、配線を減らすために本体に統合しました。
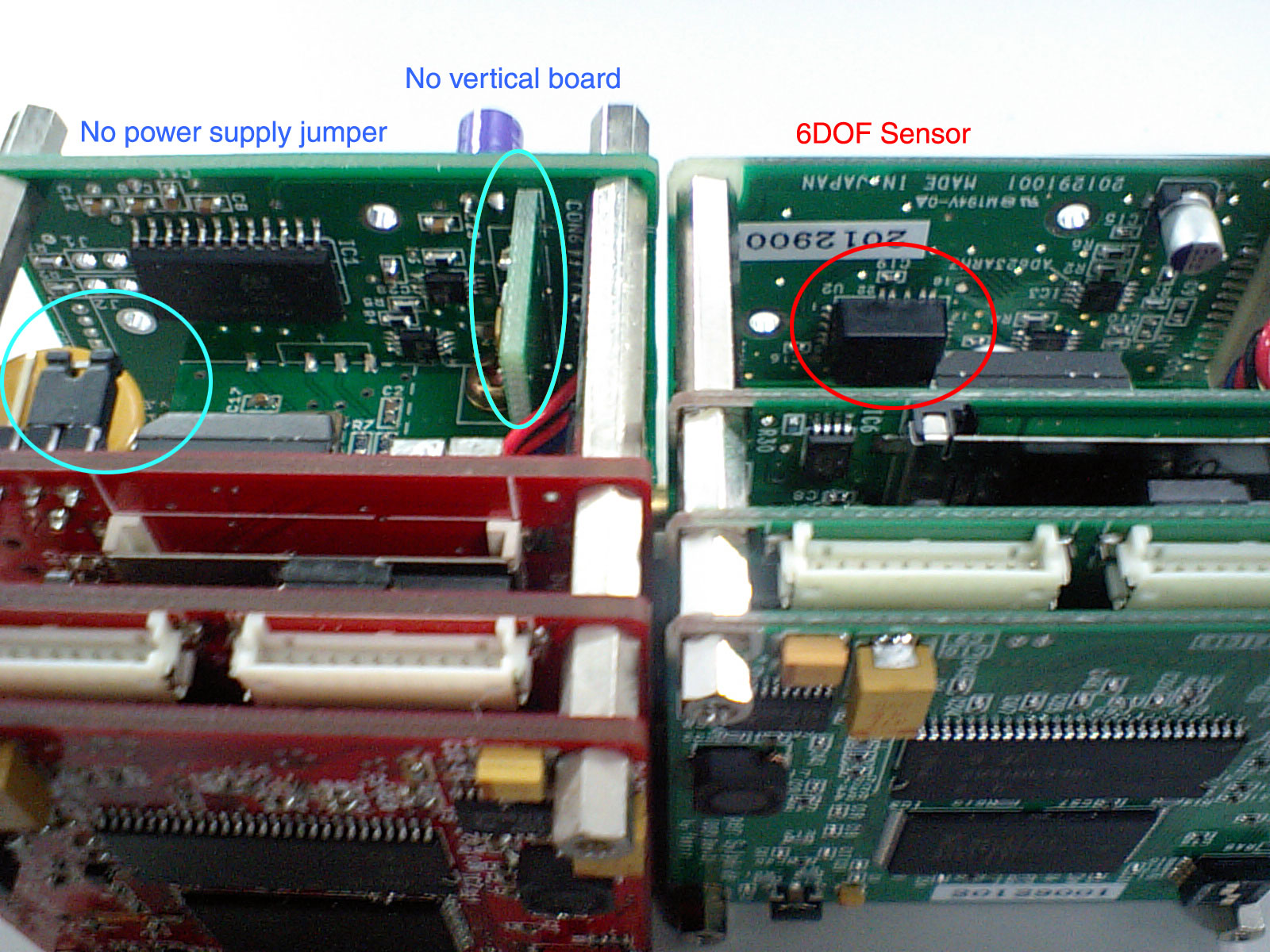
-X方向から
最後は側面からの比較その2です。委託生産品では慣性センサが6自由度のEPSON TOYOCOM AH-6100LRになったため、基板を垂直に立てる必要がなくなりました。そのため全体の高さを減らすことに成功しています。また従来は外部給電とUSB給電をジャンパで選択する必要がありましたが、これが自動切換えとなり、ジャンパを省略することができました。
最後にですが、プロの半田付けはとても綺麗でした。形が違い、信頼感がにじみ出ています(笑)。
※その後、6DOFセンサの較正作業について書きました。
※※委託生産品のマニュアルが完成しました。

| « | October 2010 | » | ||||
|---|---|---|---|---|---|---|
| 日 | 月 | 火 | 水 | 木 | 金 | 土 |
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 | ||||||