AR.Drone用 何か Rev.B
空飛ぶおもちゃAR.Droneをプロポで飛ばしたり、その他諸々のことをしたいなと思っています。そういう経緯があって以前『AR.Drone用 何か』という記事ではオリジナル基板を紹介したのですが、残念ながら回路の不備によって思った動作をしませんでした。そこで新たに設計したRev.B基板で作業を進めています。今回の記事はそのRev.B基板の紹介です。
まずは恒例の基板写真。
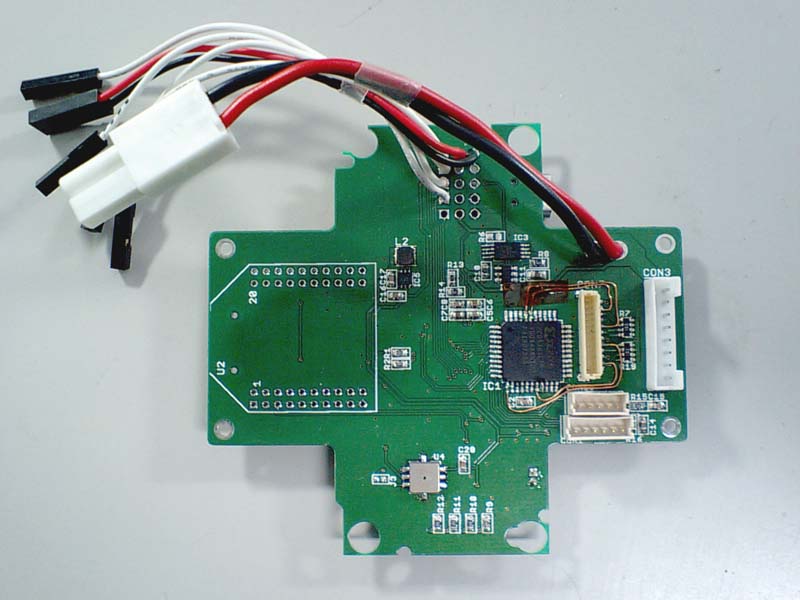
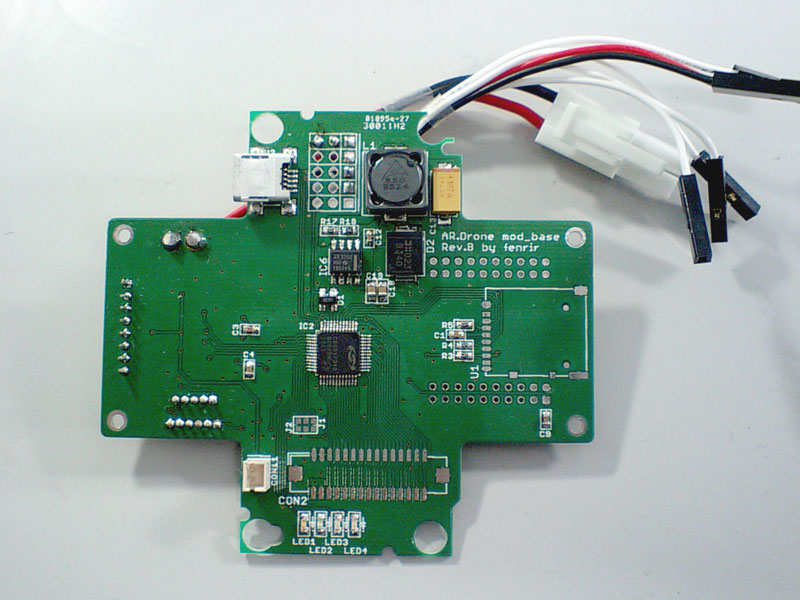
表と裏。
基本構成は以前のRev.Aとほとんど変わりませんが、以前の74標準ロジックに変えてどんなインターフェイスにも対応できるようCPLD XC9536XLを搭載したこと、絶対気圧がi2cで計測できるセンサ Bosch BMP085を追加搭載したことが主な変更点です。
この基板を使ってAR.DroneのモータコントローラであるBLC(Brushless Controller)を直接制御する(つまりAR.Droneに搭載された中央の基板であるマザーボードとナビゲーションボードを使わずに飛ばす)ということを試みていますが、ほぼ成功しつつあります。これは、ときにシリアル通信を覗き見するintercepttyを使って、また、ときに信号線を直接オシロスコープで見ることによって、BLCのプロトコルを解析することで進めています。このBLCプロトコルについては、解析方法の話も含めて、別の記事にまとめてみようと思います。
さてこの基板ですが、表面に銅線(UEW)を這わせて修正をしています。拡大図を以下に示します。
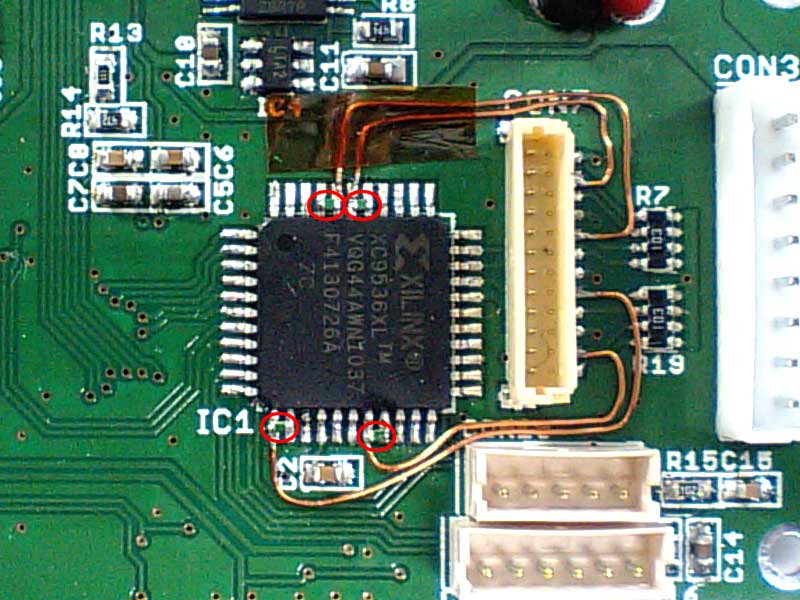
赤丸は隣接ピン短絡用0オーム
この修正は以前の『AR.Drone BLCとのI/Fで悩む』の末尾で触れた、XC9536XLの電流駆動能力不足を解消するための修正です。元の基板上のパターンに接続されたピン、銅線のピン、そしてその隣のピン、これら全部で3本のピンを束ねることによって、接続先のATmega8aが標準状態で出力しているロジックレベル(H)を覆してLにすることができました。こういう細かい修正で思ったとおりの動作をしてくれるようになると、基板が無駄にならず大変報われた気分になれます。
最後に作業風景の写真でも。机にモノが散らかっていないのは仕様外です(笑、ここから撤収することになりました)。

この机には4年間お世話になりました。
※その後、BLCのプロトコル解析結果を書きました。
※※そしてとうとうこの基板を使ってプロポで操縦できました。

コメント
>通りすがりさん
Quad Rotor、世界中ではやっていますからねぇ。何よりも狭い場所で気楽に飛ばせるのがいいですね。紹介いただいたETHのやつは、位置認識用のモーションキャプチャーの高級なカメラ装置が備え付けてあるようでうらやましいです。
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。
http://www.youtube.com/watch?v=3CR5y8qZf0Y
Posted by: 通りすがり : March 30, 2011 04:01 PMスイスのチューリッヒ工科大学、の方ですが、
これはこれで、遊び尽くしてる感が。