Super Sylphide 進捗状況(36) -- Super Sylphide 委託生産品での改善点
以前、オートパイロットシステム Super Sylphideについて、委託生産の可能性を検討しましたが、検討の結果、委託生産を行うことになりました。当時関心を寄せてくださった方にはメールにてご案内さしあげましたが、その節はありがとうございます。このたび進捗として、ハードウェアがほぼ完成したことをお知らせしたいと思います。現在、ファームウェアやキャリブレーション作業を準備しています。
今回の記事ですが、オリジナルから委託生産品の変更点、もとい改善点をまとめておこうと思います。これは使い勝手を考慮したもので、いわゆる"痒いところ"に手を入れました。写真とともにその改善点を紹介したいと思います。写真は全て左がオリジナル、右が委託生産品です。
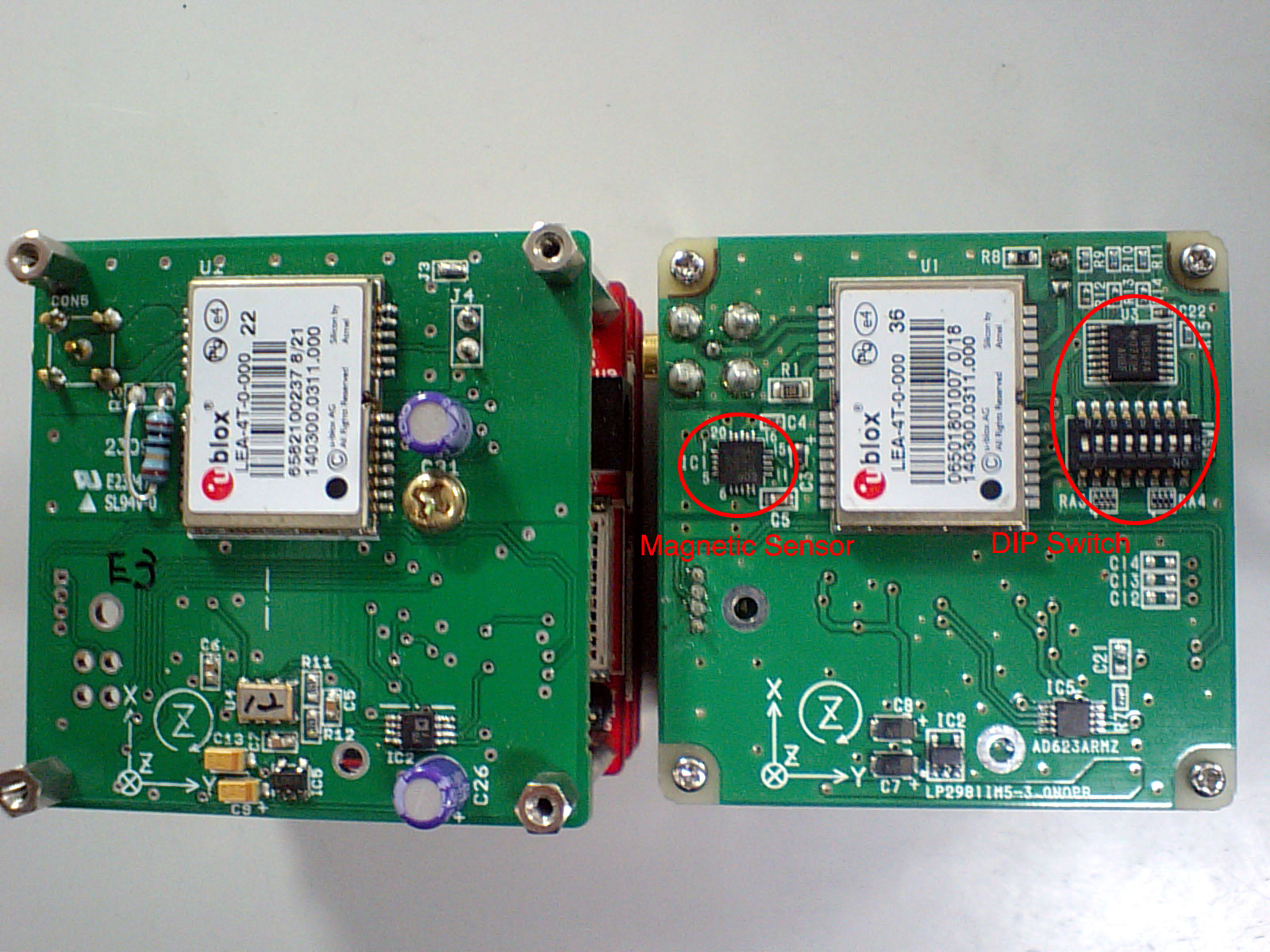
上からの写真
まずは上からの写真です。委託生産品には3軸磁気センサ(Honeywell HMC5843)とDIPスイッチが増設されています。磁気センサは地磁気をもとにヨー角をできるだけ正しく推定するためのものです(実際のところ、電動飛行機では電流が発する磁界の影響を受け、ほとんど役に立たないのですが…)。DIPスイッチはログの記録有無やUSBの機能など、設定を簡単に行えるようにするために搭載しました。さらに細かい点ですが、作業中に引っ掛けてしまいそうなコンデンサなどの背の高い部品は全て裏面に配置しました。
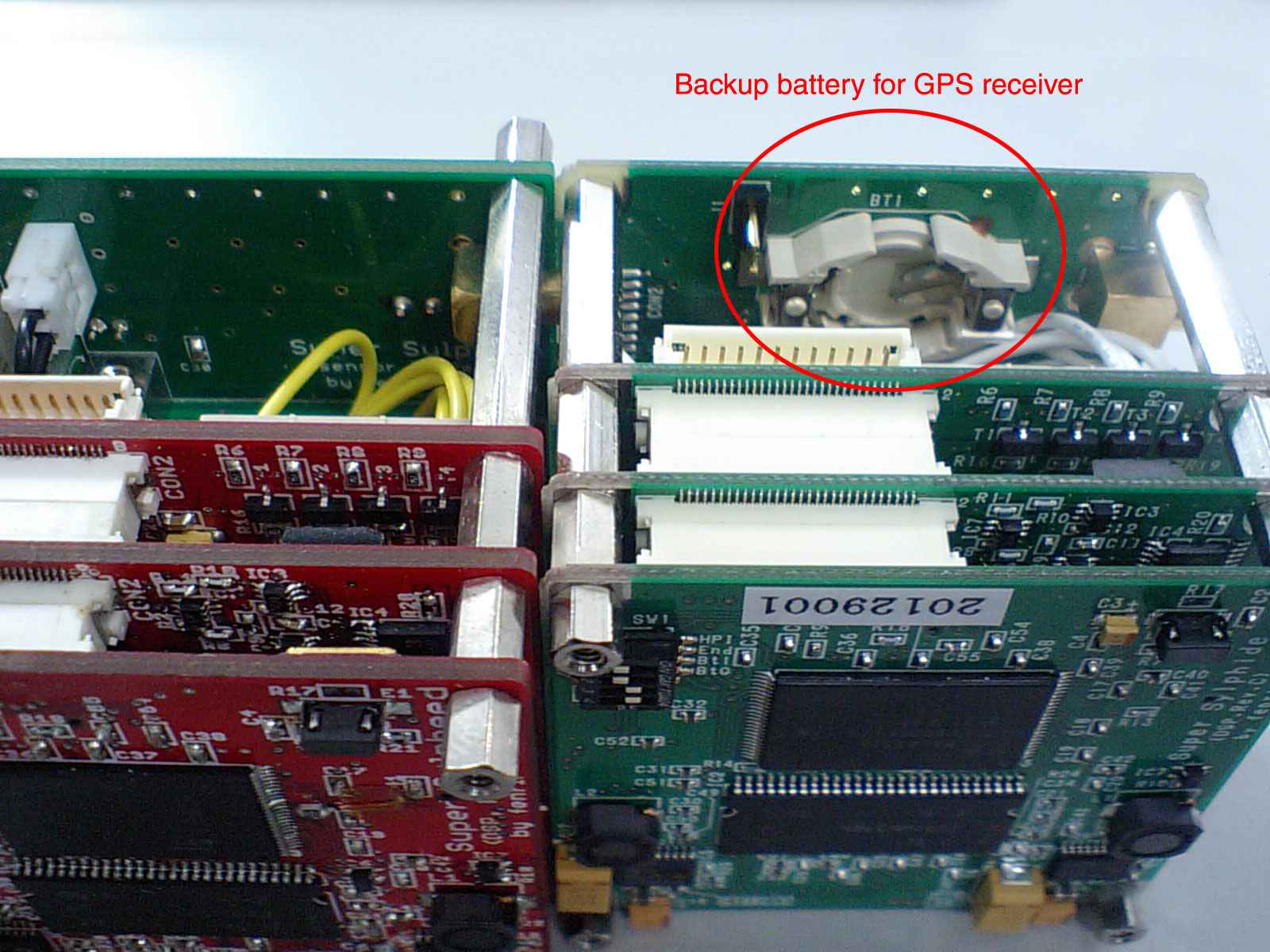
+X方向から
続いて側面からの比較その1です。委託生産品ではGPS用のバックアップバッテリを搭載することにしました。バックアップバッテリがあると、GPSの時刻や衛星軌道情報が無電源時にも保持され、電源投入から測位可能になるまでの時間が大幅に短縮されるようになります。オリジナルではこのバックアップバッテリを外部に接続できるようにしていたのですが、配線を減らすために本体に統合しました。
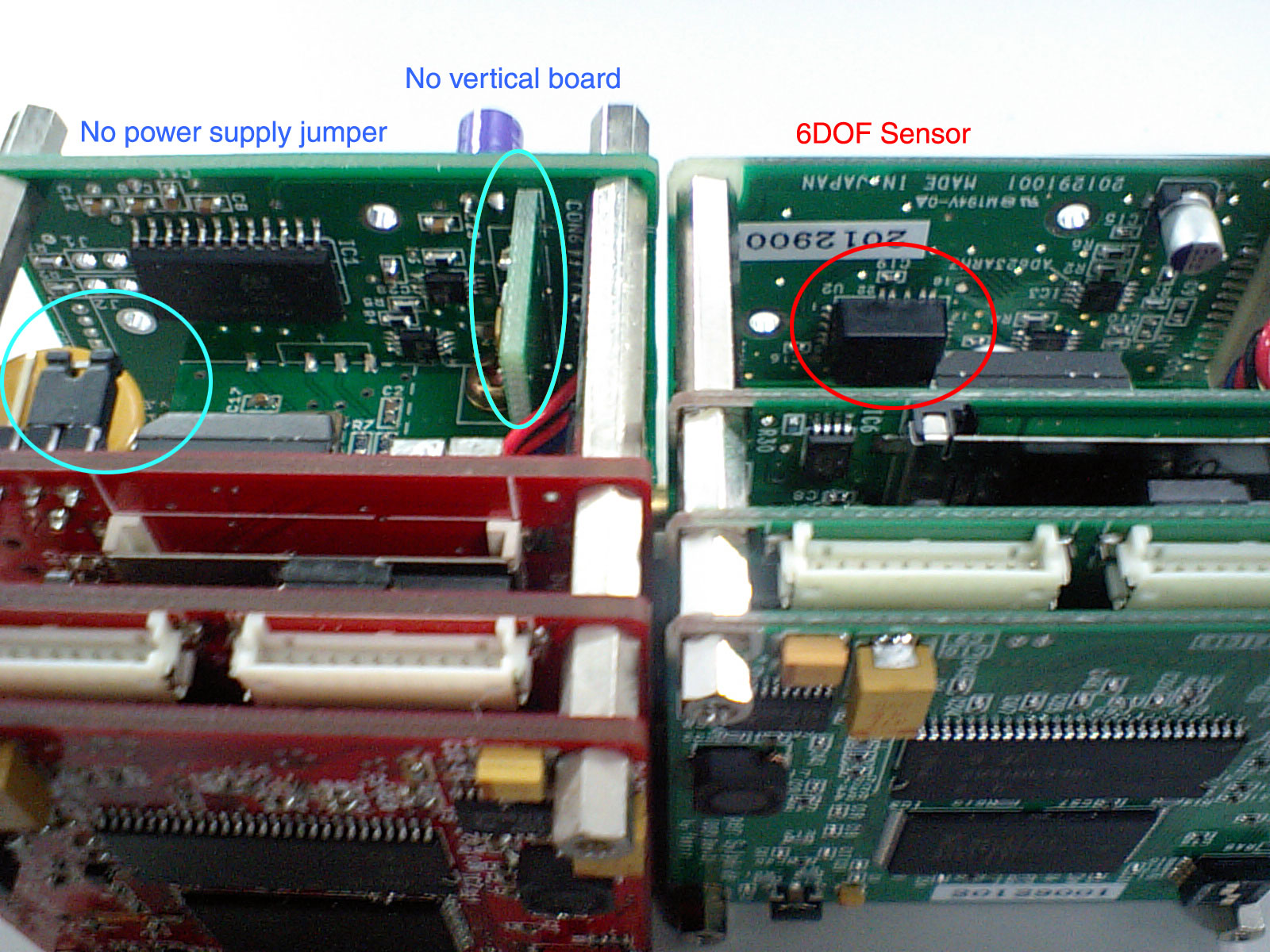
-X方向から
最後は側面からの比較その2です。委託生産品では慣性センサが6自由度のEPSON TOYOCOM AH-6100LRになったため、基板を垂直に立てる必要がなくなりました。そのため全体の高さを減らすことに成功しています。また従来は外部給電とUSB給電をジャンパで選択する必要がありましたが、これが自動切換えとなり、ジャンパを省略することができました。
最後にですが、プロの半田付けはとても綺麗でした。形が違い、信頼感がにじみ出ています(笑)。
※その後、6DOFセンサの較正作業について書きました。
※※委託生産品のマニュアルが完成しました。

コメント
コメントする
- 匿名でのコメントは受け付けておりません。
- お名前(ハンドル名可)とメールアドレスは必ず入力してください。
- メールアドレスを表示されたくないときはURLも必ず記入してください。
- コメント欄でHTMLタグは使用できません。
- コメント本文に日本語(全角文字)がある程度多く含まれている必要があります。
- コメント欄内のURLと思われる文字列は自動的にリンクに変換されます。
- 投稿ボタンを押してエラーがでなければ、投稿は成功しています。反映されるまでには少し時間がかかります。