April 02, 2024
Assisted GPS (A-GPS)クライアントの実装
GPS関係の処理をRubyから使えるようにしたgps_pvt gemは色々なストリームやファイル、シリアルポート(GPSデバイス直結)から情報を読み込めるようにしてあります。このたびv0.10で初期測位を早めるためのAssisted GPS (A-GPS)に対応しました。単独測位をするのであればgemをインストール後に以下のコマンドで例えばAndroidなどて使われているGoogleのサーバから情報を取得してA-GPSを利用できます。
生データに近い物が見たければ、以下のコマンドでJSON形式でエフェメリス等が得られます。
エフェメリス(軌道情報)を読み込む程度なので実装は簡単かなと思って始めたのですが、結果的に色々調べる必要がありました。羅列ですが、調べたものを残しておこうと思います。
- SUPL
- Secure user plane location。A-GPSの事実上の標準実装(という理解)。プロトコル名としてはUserPlane Location Protocol(ULP)。表面を覆っているのがULPで、中身のペイロードにはLPPやRRLPといった別のプロトコルが使われる。実装例が少ない中、tajuma/suplやgoogle/supl-clientが参考になった。
- LPP (TS 37.355)
- LTE Positioning Protocol。エフェメリスなどの定義がある。GPS以外の定義もしっかりされている。
- RRLP (TS 44.031)
- Radio Resource Location service Protocol。LPP同様エフェメリスなどの定義があるが古めの規格。プロトコルとしてはGPS以外も使えそうに見えるが、GoogleのSUPLサーバに問い合わせてもGPSのエフェメリスしかくれない模様。
- ASN.1 (X.680)
- Abstract Syntax Notation One。ULP, LPP, RRLPなどの文法は全てこれで書かれている。Rubyにも主にSSL証明書をパースする目的でOpenSSL::ASN1の実装があるが、機能が限定的で今回は使わなかった。代わりにRubyの構文解析ツールであるRaccを使う前提で文法asn1.yを定義し、asn.1形式の文法ファイルをパースできるようにした。asn.1をasn1.y(から作ったRubyコード)で事前にJSONに変換(upl.json.gz)して本番では利用している(rake upl.json)。Samayou Oharikuiの和文解説やGusztáv ADAMISさん(ERICSSON)のスライド(PDF)がとても参考になった。OSS NokalvaやObjective Systemsも参考にした。
- PER (X.691)
- Packed Encoding Rules。SUPLではバイナリで情報がやり取りされるが、その時のエンコーディングルールにBasic Unaligned PERが指定されている。前述の参考資料にも解説あり。RSpecで(asn.1から変換した)JSONとPER間のテストを書いて検証した。
最後におまけとなりますが、SUPLサーバに対しては携帯のようにIMEIを渡すわけではなく、問い合わせホストのGlobal IPを渡すようにしてみています。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/960
March 17, 2024
HDL-AAX2の修理
自宅NASのIO-DATA HDL-AAX2から少し異音がしていたので確認してみたところ、ファンから異音が出ていました。そこで修理をしてみることにしました。

元々ついていたファンはSunonのHA40101V4-1Q01C-F99というファンでした。残念ながら全く同じ型番のファンを見つけることができませんでしたが、DC12Vで40mm角の10mm厚、回転パルス出力付きのものであれば交換可能だろうということで、違うものに変えてみました。選んだのはAINEX CFY-40SAです。
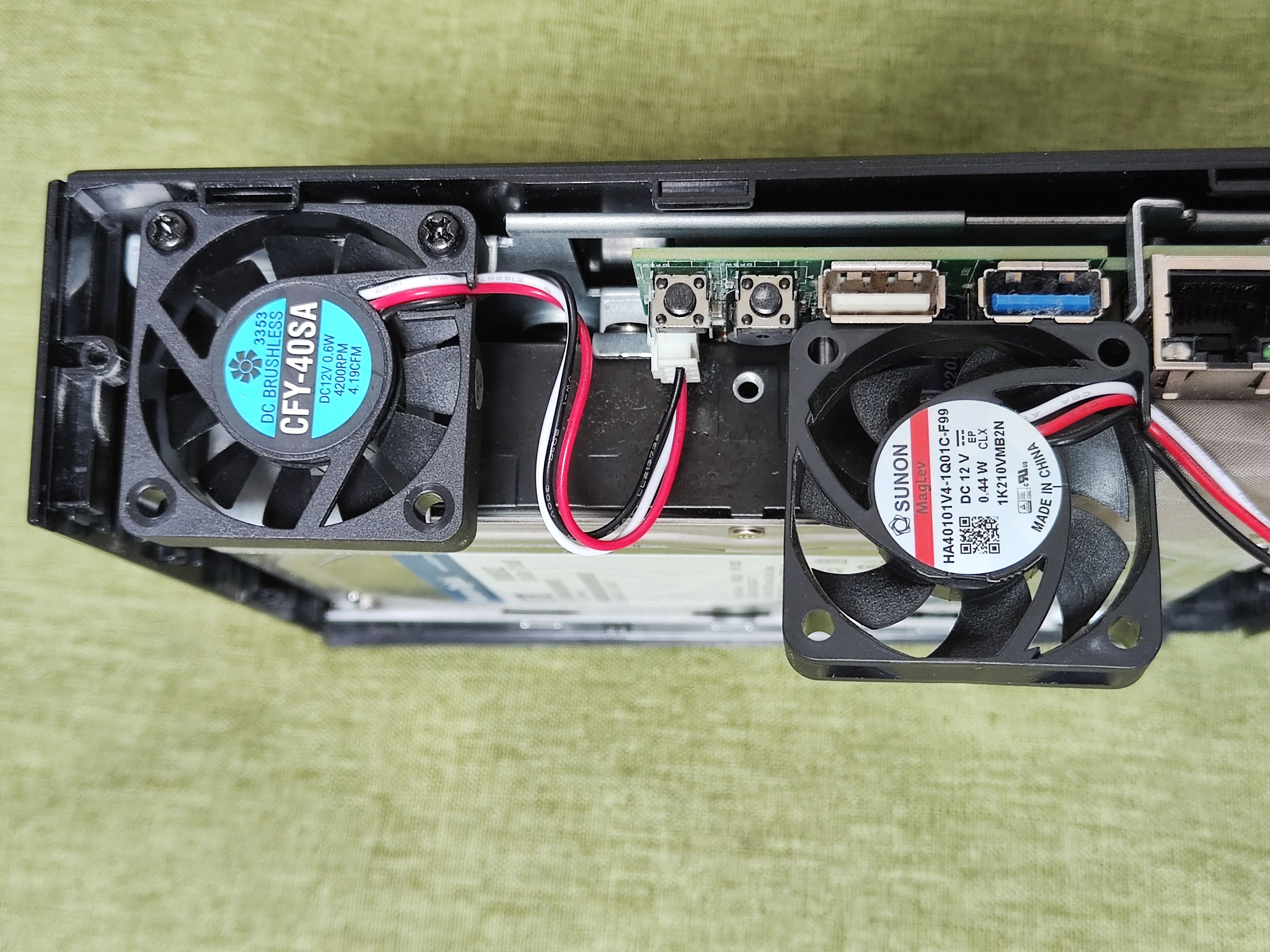
ぴったりはまりました。コネクタだけは加工する必要があって、秋月電子や千石電商などで買えるJST XHシリーズの3ピンコネクタ(ハウジング:XHP-3, コンタクト:SXH-001T-P0.6)に付け替えています。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/959
July 03, 2023
ExcelでMarkdownの表を編集
先日boost::math::distributionsのRuby gemを公開しましたが、その時にboostのバージョンによって含まれている分布の違いの一覧表を作りました。Markdownで作ったのですが、編集は元情報のExcelでやって、そこに便利なExcelアドインCopyToMarkdownAddInでMarkdownの表形式にコピペ(エクスポート)をしていました。逆コピペ(Excelにインポート)もできる優れものです。便利なツールがあって助かりました。
またハイパーリンクを付けても機能するようにしたかっので、少し改修して使いました。現在PRしたので、もしかしたらそのうちまーどされるかもしれません。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/958
June 24, 2023
Rubyで確率分布の性質を求めるgem
Rubyで確率分布の性質、例えば標準偏差が1、平均が0の正規分布において50%点はどこかというと0、といったことを求められるようにgemを作ってみました。boost_distributionsというgemで、名前が示す通りC++の標準的なライブラリであるboostの1パッケージとして確率分布を扱っているboost::math::distributionsを呼び出せるようにしてみました。
Githubのレポジトリでコードを公開しています。インストール方法(gemの前にboost本体のインストールが必要)や、使い方概要もそちらご参照ください。

実は2020年に書いていたコードがようやくgem化された形になります。gem化するにあたって、一緒にコンパイルするboostのバージョン依存性を吸収するなどの細工(ラッパーC++コードを生成するためのswigインターフェイスファイル BoostDistributions.i参照)をしています。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/957
May 23, 2023
Windowsのcygwin/MSYS2/RでSSL証明書問題の解消
ネットワークの制限の関係で、中間者傍受を許容する設定での運用になっていたとします。そこでのWindowsの設定は、いわゆるオレオレ証明書を『信頼されたルート証明機関』に配置をすることになります。Windowsと親和性が高いアプリでしたら、ほぼそれですべて解決するのですが、残念ながらそうでないものがいくつかありましたので、その解決方法をまとめておきたいと思います。
Cygwin
wgetとかcurlをやっているときにSSLがどうたらというエラーを吐いて死ぬので気が付きます。stack overflowに書いてあるやり方でうまくいきます。
$ update-ca-trust # 加えたオレオレ証明書の内容を証明書溜り(/etc/pki/ca-trust/extracted/openssl)に追加
もしupdate-ca-trustがなければca-certificatesを導入しましょう。
MSYS2
pacmanが文句を言ってくるところで気が付きました。解消方法はcygwinと同じです。MSYS2のFAQにも解説があります。
R
新しいpackageを導入しようとしたところでミラーの選択をはじめに問われるのですが、そこでインターネットが不通になっている旨 URL 'https://cran.r-project.org/CRAN_mirrors.csv': status was 'SSL connect error' という形でエラーが表示されることが気が付きました。R-3.6からR-4.2に切り替えたところでこのようなエラーが出始めて大変困っていました。これはデフォルトのダウンロード方法()であったwininetが非推奨になり、libcurlへと変わったために起きたようです。
回避方法としてはlibcurlにおとなしくなってもらいます。download.file()関数のヘルプのSecure URLsの項目に詳しい説明がありました(l最新版へのリンクなのでそのうち内容が変わってしまうかもです)。結果的にはibcurlの動作モード(libcurlVersion()で取得できる)がSchannel(OS提供の証明書情報を参照)で動いていたので本来なら問題は生じないはずなのですが、オレオレ証明書が失効リストに引っかかってしまってたようで、curlを--ssl-no-revokeで動かす必要があることがわかりました。結果、Rとしては環境変数の設定として
とすれば動作するようになりました。毎回コマンドを打ち込むのは面倒なので、起動時に設定されるよう.Rprofileの.Firstに書いておくとよいと思います。
また、あまり良い方法ではないですが、非推奨のwininetに戻すこともできます。
他にもダウンロード手段をcurlとし、オプション-kで証明書を無視する方法もあります。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/956
March 14, 2023
RubyでGPS姿勢推定
RubyでのGPS解析環境を充実させるへくgps_pvt gemを作っていますが、そのgemを応用して近接する複数アンテナを使った姿勢推定のプログラムを作ってみました。
Integer Ambiguityを全組み合わせで計算してしまうので、衛星がたくさん見えていると明らかに処理速度が落ちます。その部分を改善していきたいと思います。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/955
December 27, 2021
RubyでGPS受信機
ちょっとすごいロガーのツールの一部を切り出して、RubyでGPSの測位処理ができるようにしてみました。githubにコードを公開しています。

Rubyのgemとしているので
で入れることができます。native extensionを含むgemなのでインストール中にコンパイルが走ります。Windowsの方はビルド環境(Ruby installer for Windowsでいうところのwith Devkit版でのRuby導入)が必要になります。
gemインストール後は
とすると、測位結果がずらずらとCSVで出力されます。単独測位、スナップショットでの解なので、実用性はあまりないです。これをベースに何か発展的なことをしたいという人向けのツールです。詳しくはReadmeを見てください。
プログラム的な話をすると、native extensionを作るためのextconf.rbが凝った作りになっています。shared libraryを複数生成する必要があるので、内部でMakefileを別名で複数生成し、それらを起動するMakefileを最後に生成しています。
 | コメント ←ここから投稿できます!!
| トラックバック (0)
| コメント ←ここから投稿できます!!
| トラックバック (0)このエントリーのトラックバックURL: https://fenrir.naruoka.org/mt/mt-tb.cgi/954
Computer (187)
Embedded System (307)
Info (14)
Mountain (43)
Movable Type (28)
Movie & Animation (20)
Music (9)
Photo (47)
Site Management (46)
Timely (135)
Tips (68)