March 09, 2013
Super Sylphide 進捗状況(60) -- TinyFeather USB Bridge
オートパイロットシステムTinyFeatherですが、前回の進捗記事で取り扱ったデータの流れに加えて、USBシリアルを他のUART機器に送受信直接つなげるというデバック機能『USB Bridge』のデータの流れがあります。設定ファイルを書き込んだSDカードを挿入した状態で起動することで、このデバック機能が有効になります。現在のところGPSとXBeeにつながるようになっています。流れ図で書くと以下のとおりです。
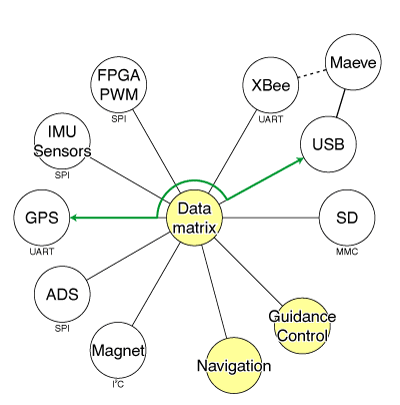
GPSと直接
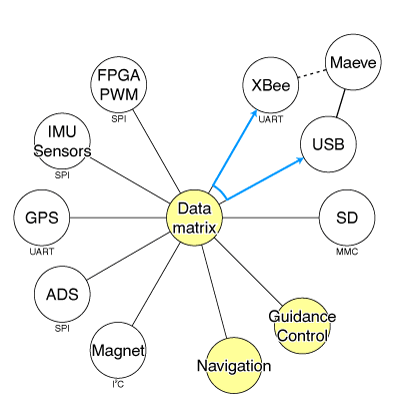
XBeeと直接
いずれの場合もdata_matrixは経由せずに、別のコード(kernel内)が中継をしています。
このUSB Bridge機能があると、GPSやXBeeの単体テストが大変しやすくなります。特に以下2つの点が使い勝手として大変良くなります。
1つ、GPSについては、GPS自身のファームウェアの書き換えが発生することがあるのですが、基板上に半田付けされたGPSモジュールに書き換えのためだけのジャンパ配線をわざわざする必要がなくなります。
2つ、XBeeなどの無線機器は事前に通信可能距離の確認を行う必要があるのですが、わざわざXBeeをUSBに変換する機器を用意する必要がなくなります。
将来的にはUSB Bridge機能を拡張して、TinyFeatherにシェルコンソールを用意しようと考えています。そうするとPCとTinyFeatherの協調動作がしやすくなるのではと考えています。
※シェルを作るどころか、mrubyが動作するようになりました。

コメント
コメントする
スポンサード リンク