December 09, 2012
Maker Faire Tokyo 2012 おまけ
今更感あふれますが、Maker Faire Tokyo 2012 『はかるひと』 展示にお越しくださった方、ありがとうございます。次回もまた楽しいものが出せるよう、精進したいと思います。といだせんせー や いなさま のまとめ記事もどうぞ。
さて、いつの間にか『はかるひと』の目立つ展示になっていた、メイドさん、じゃなくってメイドさんが持っていたお盆ですが、その技術的な解析をしたいと思います。といってもお盆の制御系を書いたブロック線図を一枚、貼るだけです。
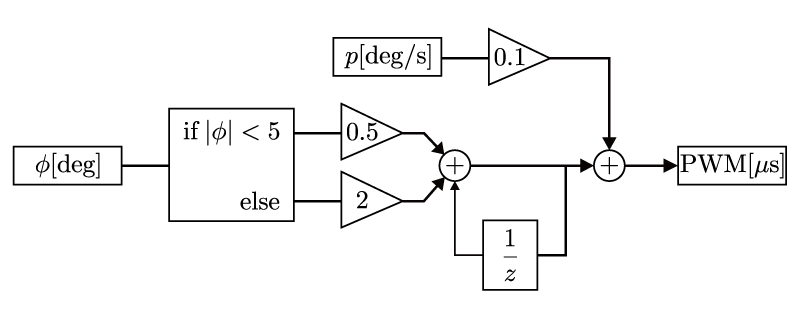
ブロック線図
図はロール方向(ロール角φ、ロール角速度p)の制御系について書いてありますが、ピッチ方向(ピッチ角θ、ピッチ角速度q)も同じです。ブロック線図から分かる通り、お盆はPD制御で動いていました。それぞれゲインは適当に調整したのですが、角度の差がない(5度以下)の場合は、Pゲインを小さ目(0.5)に設定してあります。これはゲインが大きい(2)と、サーボの遅れとカップリングして、角度が浅いところで周期的な振動を起こしてしまうので、回避策としてPゲインを切り替えることにしました。当日前の動画は、このゲインの切り替えがされていない状態のものでした。
当日の動作、RCDFDLさんが撮られた動画を、借用させていただいております。
姿勢角や姿勢角速度はTinyFeatherのINS/GPS演算から得ています。室内でしたので、"動いていない"という疑似GPS情報(位置、速度ともにゼロ)を定期的にいれることで、姿勢角に関係した部分のみを安定して計算させていました。センサのバイアス推定が入っていますので、今回のデモのように長時間動かしても誤差がたまることなく動作します。
難しい話をせずに楽しんでもらうのがMake:イベントの王道だと思いますので、今後も裏では複雑なことをしつつ、体験できる系の作品に仕上げたいと思います。とはいっても、メイドさんが最重要かもしれませんが(笑)。
※日経新聞の1面コラム『春秋』で、お盆が紹介されました! 2012/12/14のweb版記事の魚拓。

MAKEではありがとうございました.
横浜国大の虎谷です.
このブログをいつも参考にさせて頂いていました.
メインの研究で扱っているわけではないのですが,あちこちでUAVを飛ばして遊んでいます.
(最近はバルーンの代わりに缶サットを落とすUAVをつくっています)
TinyFeather, NinjaScanともに興味津々なので,販売開始を楽しみにしています.
>higeduraさん
コメントありがとうございます、fenrirです。TinyFeatherはもうそろそろアナウンスできる予定なのですが、大人の事情(笑)があるので、予定は未定ですいません。あと研究など学問分野で使っていただけるのでしたら、いろいろと融通が利くと思います。今後ともよろしくお願いします。