May 18, 2006
プロポとPCの接続
室内飛行機の航法系を検討していましたが、その中でビデオカメラを用いて位置や姿勢の同定を行うというプランがあります。
ところで、実際に室内飛行機を飛ばすためには航法系の上位にある制御系を構築し、画像処理の結果を制御に反映する必要があるのですが、そのための方法として画像処理を行ったPCからラジコン用のプロポを制御するということを考えてみました。プロポというのはラジコンを飛ばすために必要な通常は人間が操縦する無線の送信機のことで、プロポから送信された電波を飛行機内の受信機が受信しサーボやスピードコントローラを制御することによって、ラジコン飛行機は飛んでいます。
今回はこのプロポを、人間ではなく、画像処理に用いたPCが操縦することによって、飛行機を自律制御することを考えてみました、という話題です。
このプロポですが、ある機種にはトレーナー機能というものがあります。これはラジコン初心者が上級者と共に操縦の練習をするための機能で、いってみれば自動車教習のようなシステムです。すなわち、初心者と上級者の2台のプロポをトレーニングケーブルと呼ばれるケーブルで繋ぎ、初心者がおかしな操縦をしたな、と上級者が判断した場合に、上級者の操縦が上書きされるようにするシステムです。つまり、今回はトレーナーケーブルを流れる信号を模擬して入力してやることにより、人間でなくともプロポによる操縦が可能となるわけです。
以下、続きをどうぞ。
※その後、接続が完了しました。
このトレーナーケーブル信号乗っ取り作戦を行うにあたり、トレーナーケーブルを流れている信号を観察してみることにしました。結果は単純で以下の画像のとおり、パルスを複数いれるのを一定周期ごとに繰り返せばよいようです。なお、プロポの機種によってはトレーナーケーブルを流れる信号に違いがあるようです。今回使用したのは、フタバというメーカーの6chのプロポ、T6EXAという機種です。
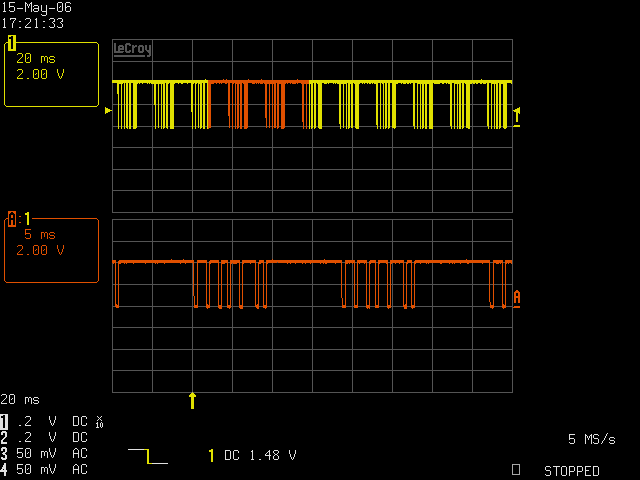
全体図
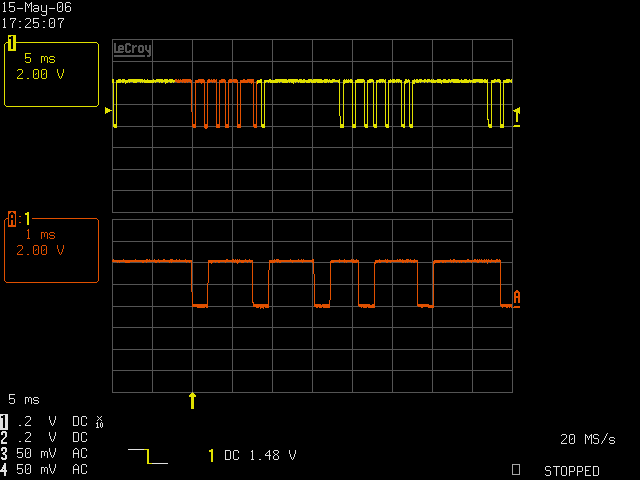
スロットル(Ch.3)を最小にした場合
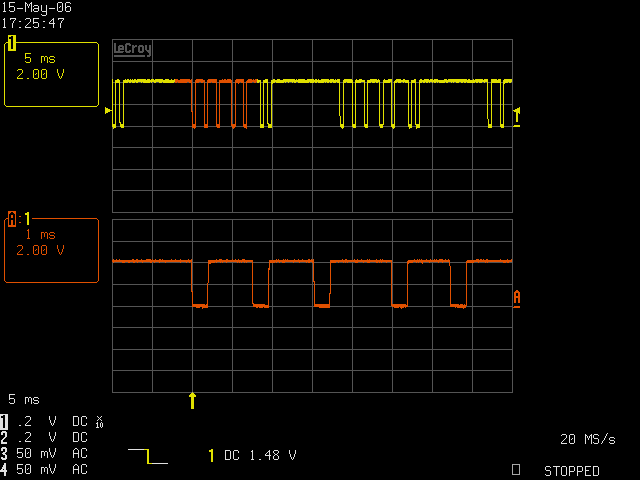
スロットル(Ch.3)を最大にした場合
画像が上と下に分かれていますが、下は上の一部を拡大したものです。これによると18msごとにパルスの塊を繰り返せばよく、その1つの塊は
Low 0.4ms
High (Ch.iの操縦量、最小=0.8ms、最大=1.6ms)
}
Low 0.4ms
今後はこの信号をPCに接続したマイコンで作成する予定です。また調べてみたところ、以下のページが参考になりました。
一番上のリンクはまさにこれからやろうとしていることです。残りの2つはプロポをPCと接続して、そのプロポをPC用フライトシミュレータの入力装置として使うという今回とは逆の使い方ですが、コネクタのピン配置など参考になることが多いです。
このシステムは上級者の操作を人間が行う、という想定でしょうか?だとすると、カメラの情報を元に制御するのに加えて外部から入力される信号を教師信号として扱い、ニューラルネットワークを構成するのも面白そうですね。複雑な制御ループがより複雑になってしまいそうですが…。
Posted by: odawara : May 20, 2006 02:16 AM>odawaraさん
そこまで考えていませんでした(笑)。プロポを使ってコントロールできるものは意外に多いので、一度このようなものを作ってしまえば他のメカトロ系に応用できるだろう、ということで採用となりました。
ニューラルですか、僕のそばでパイロットの操縦解析をニューラルでやっている人がいます。ニューラル微妙、と少し昔は嘆いていましたが最近はどうなんでしょう。
確かにプロポはいろいろと使えますね。そこそこ信頼性の高い無線通信が実現できる気がしますし。
ニューラルネットワーク、僕の友人がスパムフィルタに使う研究をしてましたね。その人も微妙と言っておりました(笑)いまどきの学習型フィルタってどの辺りがメジャーなんでしょうね。
>odawaraさん
使い方ですが、やばくなったら裏で有人で操縦というのを考えています(笑)、それと招待券どうもです
教えてください RCジャイロセンサーの信号を PIC基板を通して RCプポロポ送信機の トレーナー端子に入力できるのでしょうか? ジャイロはPWM信号を出しています。
このような物 製作したいのですが
http://www.youtube.com/watch?v=KDPS4Hgndmc&feature=related
http://www.youtube.com/watch?v=baoHWooXxqA&feature=related
最終はこのような 空撮用 RCプレーなんですが
http://www.youtube.com/watch?v=GCd5sVdRa6k&feature=related
>JA2YYNさん
PICに限らずマイコンのタイマ機能でジャイロの信号を計測し、その結果を加工して、再びマイコンからトレーナー端子用の信号を出力すれば可能です。必要なタイマの機能は、入力にはジャイロの個数分、出力には1ch使う必要があるので、それを考慮の上でマイコンを選択されるのがよいと思います。