July 27, 2010
Super Sylphide 進捗状況(32) -- Tiny Feather IMU + Servo I/F
オートパイロットシステムSuper Sylphideですが、小型化版のTiny Featherの設計も順調に進んでいます。既に計算、記録用のボードは設計と製作が完了していますが、新たにセンサ、およびサーボとのインターフェイスを搭載した基板が設計完了しましたので紹介します。Tiny Featherは、標準的なシステムとしてこの2枚でSuper Sylphideと同等以上の機能を実現しました。
まずは恒例の基板アートワークから。従来のSuper Sylphideのセンサ基板は2層でしたが、複雑になったので4層に変更しました。
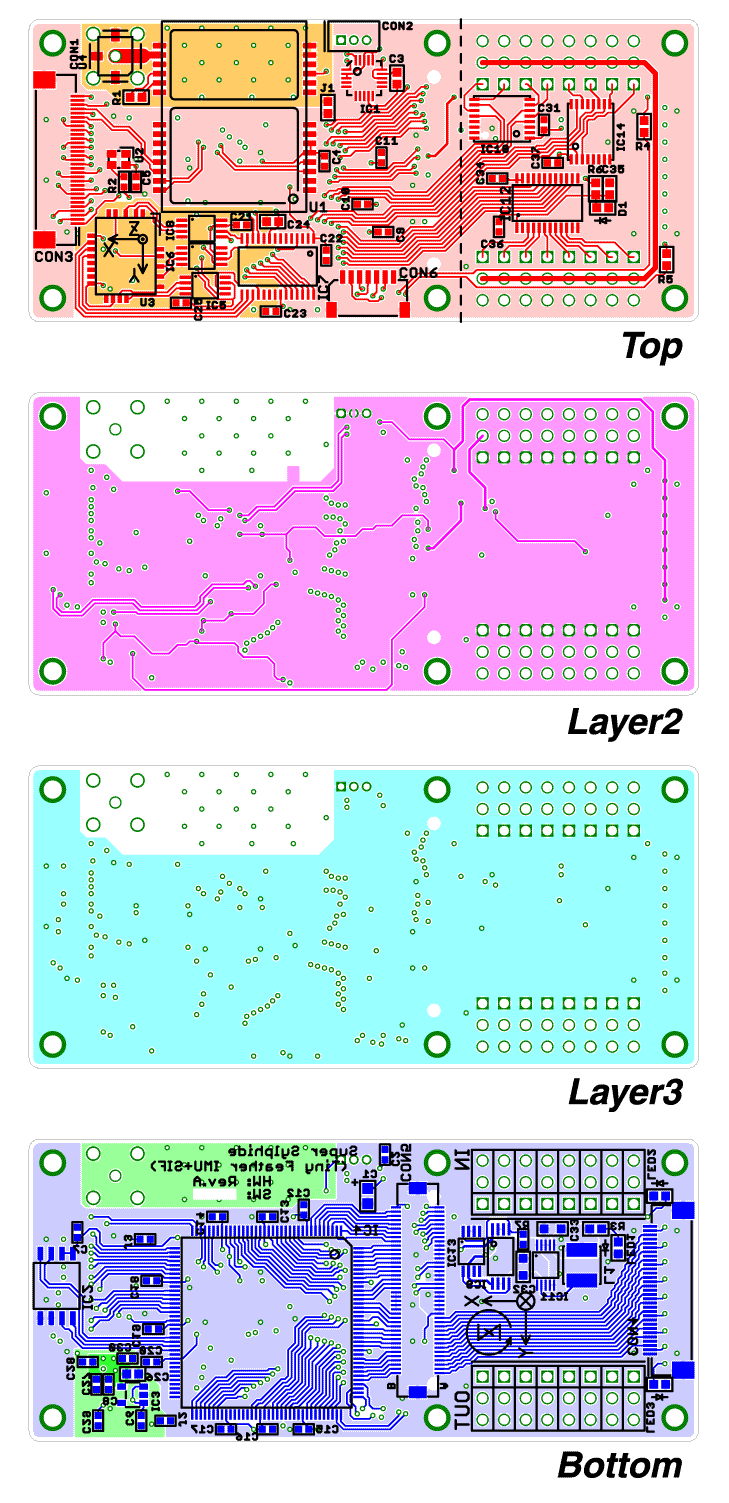
搭載しているセンサなどの仕様は以下のとおりです。
- 大きさは1.4 x 3.1 inch (約 36 x 79 mm)
- 従来、ジャイロが搭載された基板を垂直に立てることでX,Y,Zの3軸の角速度をとっていたが、加速度計3軸、およびジャイロ3軸の6自由度が1パッケージに収まったエプソントヨコム AH-6100LRを採用することでよりコンパクトに。いくつか仕様があるうち 500deg/s、+/-3Gのものを搭載予定
- GPSは相変わらずu-blox。最新のLEA-6T、あるいは旧製品のLEA-4Tを搭載予定
- さらに3軸の磁気コンパスHoneywell HMC5843も搭載
- 加速度計とジャイロは24bit Delta-Sigma A/DのTI ADS1248で計測
- サーボ I/Fの信号線は8ch入力、8ch出力。ハイトルクタイプも対応しており、入力バッファに74HC4050をいれてあるので最大10V程度まで対応可能
- アビオニクスとサーボ用電源の自動切換えを搭載しており、電源の多重化が可能
- 全ての線はAltera MAXIIに接続してあるので組み替えが容易
- 記録用やDSPブート用にSPI ROMを搭載
図面は基板屋さんのpcbcartに出しました。部品も大半はDigiKeyで調達済みです。製作が夏休みの宿題になりそうです。
※その後、Air Data Sensorと呼ばれる大気高度、風速、風向計も小型化しました。
※※この基板、組み立て完了しました。
※※※この基板上のCPLDの中身を公開しました。

センサは日進月歩で進化しているようですね。
トップページにリンクされているシステム図では
磁気コンパスがなかったようですが、
今までは方位角の初期値はどうやって取得していたんですか?
>kentaさん
航空機用のみを考えるのであれば、はじめに大きな加速をした時間帯が離陸に相当します。離陸の場合、当然滑走路上で横滑りなどしないわけですから、その速度ベクトルを初期方位角として初期化すればよいという寸法です。
電動UAVの場合、機体内部の磁気環境がかなり悪いことが計測で事前にわかっていたので、オリジナルのSylphideでは磁気コンパスを省きました。TinyFeatherは航空機以外にもヘリやクワッドロータ機などへも載せることを想定してつけました。
また外部委託生産版のSylphideには磁気コンパスを載せる方向で調整しています。具体的なお話はお盆明けくらいにメールいたしますね。